
Parametre
P00 Temel Ayarlar
P00-01 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | |||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Servo Kontrol Modu | Rdy | Hemen | 1 | 1 - 6 | Temel Ayarlar | - | ||||||||||||||||||||||||||||||||||||||||
Servo sürücünün kontrol modunu ayarlamak için kullanılır.
MixMode kullanımı için; 6.5 Mixed control mode. ✎Not: VD2L Serisi servolar için değer aralığı 1-3 arasındadır. MixModu desteklemez! | ||||||||||||||||||||||||||||||||||||||||||||||
P00-04 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Motor Dönüş Yönü | Rdy | Hemen | 0 | 0 - 1 | Temel Ayarlar | - | ||||||||||
Motorun dönüş yönünü ayarlamak için kullanılır.
| ||||||||||||||||
P00-05 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Motor Duruş Yöntemi | Rdy | Hemen | 0 | 0 - 1 | Temel Ayarlar | - | |||||||||
Set the forward rotation direction of the motor when looking at the motor axis.
| |||||||||||||||
P00-09 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Frenleme Direnci | Run/Rdy | Hemen | 0 | 0 - 3 | Temel Ayarlar | - | |||||||||||||
Frenleme enerjisinin sönümlemek ve hızlı duruşları gerçekleştirmek için kullanılır.
| |||||||||||||||||||
P00-10 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Harici Frenleme Direnci Değeri | Run/Rdy | Hemen | 50 | 0 - 65535 | Temel Ayarlar | Ω | |
Servo sürücünün harici frenleme direncinin değerini ayarlamak için kullanılır. Hesaplanan maksimum frenleme enerjisi değeri, kondansatör tarafından emilen maksimum frenleme enerjisinden daha büyük olduğunda ve hesaplanan frenleme gücü değeri dahili frenleme direnci gücünden daha büyük olduğunda, harici frenleme dirençleri gereklidir. P00-10 değeri çok büyükse, Er.25 (çok büyük frenleme direnci değeri) veya Er.22 (ana güç kaynağı aşırı voltaj) meydana gelecektir. Harici bir frenleme direnci kullanırken, C ve D arasındaki kısa devre bağlantısı sökülmeli ve harici frenleme direnci P+ ve D arasında bağlanmalıdır. | |||||||
P00-11 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Harici Frenleme Direnci Gücü | Run/Rdy | Hemen | 100 | 0 - 65535 | Temel Ayarlar | W | |
Servo sürücünün harici frenleme direncinin, direnç değerini ayarlamak için kullanılır. Harici frenleme direncinin gücü (P00-11) frenleme direnci güç hesaplama değerinden daha az olamaz. | |||||||
P00-12 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Harici Pulse Giriş Tipi | Run/Rdy | Servo Restart Edilmeli | 0 | 0 - 5 | Pozisyon Modu | - | |||||||||||||||||
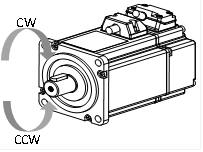
Servo Pozisyon Kontrol Modunda ve pulse komutu harici seçiliyse (P01-06=0) kullanılabilir. CW: Saat Yönü CWW: Ters Saat Yönü
✎Not: VD2L Serisi CW/CCW modunu desteklemez! VD2L Serisi için P0-12 parametre değerleri: 0, 2, 3, 5 seçilebilir. | |||||||||||||||||||||||
P00-13 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Maksimum Giriş Pulse Frekansı | Rdy | Hemen | 300 | 1 - 500 | Pozisyon Modu | KHz | |
Servo Pozisyon Kontrol Modunda ve pulse komutu harici seçiliyse (P01-06=0) kullanılabilir. Giriş pulse frekansı, ayarlanan değerden büyük olduğunda, servo A-86 (Giriş Pulse Frekansı Çok Yüksek) uyarısı verecektir. | |||||||
P00-14 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Pulse Parazit Önleme Seviyesi | Run/Rdy | Servo Restart Edilmeli | 2 | 0 - 9 | Pozisyon Modu | - | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Servo Pozisyon Kontrol Modunda, pulse girişini filtrelemek için kullanılır. Ayar değeri ne kadar büyükse, filtre derinliği de o kadar büyük olur. ✎Not: VD2L serisi sürücünün P0-14 filtreleme süresi diğer VD2 serisi modellerinkiyle tutarlı değildir.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
P00-16 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Servo Bir Tur için Giriş Pulse Değeri | Rdy | Hemen | 10000 | 0 - 131072 | Pozisyon Modu | Pulse | |
Motorun bir tur dönmesi için gereken Pulse değeridir. Default olarak değeri 10000'dir. Servo sürücüye 10000 pulse verilirse motor 1 tur dönecektir. Örnek Hesaplama; Motor 2000 pulse değerinde bir tur dönülmesi isteniyorsa; Motorun 1 saniyedeki devri: (Motor Devri/Saniye) ⇒ 3000/60=50 rpm Frekans Hesabı: Motor bir saniyedeki devri * Frekans Hesabı: (Motor bir saniyedeki devri )*(Servo Bir Tur için Pulse Değeri) ⇒50*2000=100kHz Yani servoya 100kHz frekans ve 2000 pulse verildiğinde, motor 3000rpm'de 1 tur dönecektir. | |||||||
P00-17 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Elektronik Dişli Oranı 1 (Numerator) | Run/Rdy | Hemen | 1 | 1 - 4294967294 | Pozisyon Modu | Pulse | |
Servo motorun pulse değerini Elektronik Dişli Oranı ile ayarlamak istiyorsanız, P00-16 parametresi 0 yapılmalıdır aksi halde motor P00-16 parametresindeki değere göre çalışacaktır. ✎Not: VD2L serisi servo için değer aralığı; 1 - 2147483647. | |||||||
P00-18 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Elektronik Dişli Oranı 1 (Denominator) | Run/Rdy | Hemen | 1 | 1 - 4294967294 | Pozisyon Modu | Pulse | |
Servo motorun pulse değerini Elektronik Dişli Oranı ile ayarlamak istiyorsanız, P00-16 parametresi 0 yapılmalıdır aksi halde motor P00-16 parametresindeki değere göre çalışacaktır. ✎Not: VD2L serisi servo için değer aralığı; 1 - 2147483647. | |||||||
P00-19 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Elektronik Dişli Oranı 2 (Numerator) | Run/Rdy | Hemen | 1 | 0 - 4294967294 | Pozisyon Modu | Pulse | |
Servo motorun pulse değerini Elektronik Dişli Oranı ile ayarlamak istiyorsanız, P00-16 parametresi 0 yapılmalıdır aksi halde motor P00-16 parametresindeki değere göre çalışacaktır. ✎Not: VD2L serisi servo için değer aralığı; 1 - 2147483647. | |||||||
P00-20 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Elektronik Dişli Oranı 2 (Denominator) | Run/Rdy | Hemen | 1 | 0 - 4294967294 | Pozisyon Modu | Pulse | |
Servo motorun pulse değerini Elektronik Dişli Oranı ile ayarlamak istiyorsanız, P00-16 parametresi 0 yapılmalıdır aksi halde motor P00-16 parametresindeki değere göre çalışacaktır. ✎Not: VD2L serisi servo için değer aralığı; 1 - 2147483647. | |||||||
P00-21 ☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Bölücü Pulse Cıkış Yönü | Run/Rdy | Servo Restart Edilmeli | 0 | 0 - 1 | Pozisyon Modu | - | |||||||||||||
Pulse frekansı bölme çıkış yönünü ayarlamak için kullanılır. “☆” VD2F serisi bu fonksiyonu desteklemez.
✎Not: VD2L serisi CW/CCW modunu desteklemediği için Direction+Pulse olarak ayar yapılabilir;
| |||||||||||||||||||
P00-22 ☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Bölücü Pulse Çıkış Değeri | Run/Rdy | Servo Restart Edilmeli | 2500 | 0 - 2500 | Pozisyon Modu | - | |
✎Not: Servo motor her dönüşünde AB fazları 2500'e kadar pulse çıkışı verebilir. Alıcı cihazın 10000 pulse ihtiyacı varsa AB(4x) fonksiyonunu desteklemesi gerekir. “☆” VD2F serisi bu fonksiyonu desteklemez. | |||||||
P00-23 ☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Z Pulse Çıkış Polaritesi (OZ) | Run/Rdy | Servo Restart Edilmeli | 0 | 0 - 1 | Pozisyon Modu | - | |||||||
Z Pulse'nin lojiğini ayarlamak için kullanılır “☆” VD2F serisi bu fonksiyonu desteklemez.
| |||||||||||||
P00-24 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Z Pulse Çıkış Genliği | Run/Rdy | Servo Restart Edilmeli | 3 | 1 - 200 | Pozisyon Modu | ms | |
Z puls çıkış genliğini ayarlayın; 1: Pulse width 1ms 2: Pulse width 2ms …… 200: Pulse width 200ms ✎Not: Bu fonksiyonu sadece VD2F serisi destekler. | |||||||
P00-25 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Pozisyon Sapma Limiti | Rdy | Hemen | 60000 | 0 - 2147483646 | Pozisyon Modu | Pulse Birimine Denk | |
Pozisyon sapma sınır değerini ayarlamak için kullanılır. Motorun gerçek sapması, ayarlanan değeri aştığında, Er.36 hatası oluşur (pozisyon sapması çok büyük). Parametre değeri 0 yapılırsa, pozisyon sapma hatası devre dışı bırakılır. | |||||||
P00-27 ☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Bölücü Pulse Çıkış Değeri (Numerator) | Run/Rdy | Servo Restart Edilmeli | 1 | 1 - 2500 | Pozisyon Modu | - | |
Bölücü pulse çıkış değerini Numerator/Denominator şeklinde ayarlamak için kullanılır. Bu fonksiyon kodunu kullanmak için P00-22 parametre değeri "0" ayarlanmalıdır(P00-22=0). “☆” VD2F serisi bu fonksiyonu desteklemez. | |||||||
P00-28 ☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Bölücü Pulse Çıkış Değeri (Denominator) | Run/Rdy | Servo Restart Edilmeli | 1 | 1 - 2500 | Pozisyon Modu | - | |
Bölücü pulse çıkış değerini Numerator/Denominator şeklinde ayarlamak için kullanılır. Bu fonksiyon kodunu kullanmak için P00-22 parametre değeri "0" ayarlanmalıdır(P00-22=0). “☆” VD2F serisi bu fonksiyonu desteklemez. | |||||||
P00-29 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
The number of equivalent position units in one circle | Rdy | Hemen | 10000 | 0 - 131072 | Pozisyon Modu | - | |
The equivalent position unit of one circle of the motor | |||||||
P00-30 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Çok-Turlu Absolute Encoder Pil Hatası | Run/Rdy | Servo Restart Edilmeli | 0 | 0 - 3 | Temel Ayarlar | - | ||||||||||||||||
Çok-Turlu Absolute Encoder'li motorlarda pil hatası için kullanılır. (VD2-SA, V1.13 ve üstü modeller destekler)
| ||||||||||||||||||||||
P00-31 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Encoder Okuma/Yazma Anormal Frekans | Run/Rdy | Hemen | 20 | 0 - 100 | Temel Ayarlar | - | |
0: Alarm devre dışı Bu ayar değeri aşıldıktan sonra, servo "A-93" enkoder okuma/yazma anormal frekans uyarısı verecektir. | |||||||
Grup P01 Kontrol Parametreleri
P01-01 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Hız Komut Kaynağı | Rdy | Servo Restart Edilmeli | 0 | 0 - 1 | Hız Modu | - | ||||||||||
Hız modunda, servonun hız komut kaynağını seçmek için kullanılır.
“☆” VD2F ve VD2L serisi analog girişi (AI) olmadığı için bu fonksiyonu desteklemez. Sadece dahili hız komutunu kullanabilirsiniz. | ||||||||||||||||
P01-02 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Dahili Hız Komutu 0 | Run/Rdy | Hemen | -5000 - 5000 | Hız Modu | Hız Modu | ||
-5000 to 5000* | |||||||
Servo hız modundayken dahili hız komutunun hız değerini ayarlamak için kullanılır ve yalnızca "P01-01=0" olduğunda geçerlidir. “*” VD2F servo sürücünün ayar aralığını gösterir. | |||||||
P01-03 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Hızlanma Süresi | Run/Rdy | Hemen | 50 | 0 - 65535 | Hız Modu | ms | |
Hız modunda, servonun 0'dan 1000 rpm'e hızlandığı süre. Detaylı doküman için; 6.3.2 Acceleration and deceleration time setting | |||||||
P01-04 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Yavaşlama Süresi | Run/Rdy | Hemen | 50 | 0 - 65535 | Hız Modu | ms | |
Hız modunda, servonun 1000'den 0 rpm'e yavaşladığı süre. Detaylı doküman için; 6.3.2 Acceleration and deceleration time setting | |||||||
P01-05 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Servo Kapanış Yavaşlama Süre | Run/Rdy | Hemen | 50 | 0 - 65535 | - | ms | |
Servo, Run modundan Rdy moduna, acil stop durumunda veya enerjisi kesildiği zaman 1000'den 0 rpm'e yavaşladığı süre. | |||||||
P01-06 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Pozisyon Komut Kaynağı | Rdy | Hemen | 0 | 0 - 1 | Pozisyon Modu | - | ||||||||||
Pozisyon modunda, servonun pozisyon komut kaynağını seçmek için kullanılır.
| ||||||||||||||||
P01-07 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Tork Komut Kaynağı | Rdy | Hemen | 0 | 0 - 1 | Tork Modu | - | ||||||||||
Tork modunda, servonun tork komut kaynağını seçmek için kullanılır.
“☆” VD2F ve VD2L serisi analog girişi (AI) olmadığı için bu fonksiyonu desteklemez. Sadece dahili tork komutunu kullanabilirsiniz. | ||||||||||||||||
P01-08 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Dahili Tork Komutu 0 | Run/Rdy | Hemen | 0 | -3000 - 3000 | Tork Modu | 0.1% | |
Servo tork modundayken dahili tork komutunun tork değerini ayarlamak için kullanılır ve yalnızca "P01-07=0" olduğunda geçerlidi | |||||||
P01-09 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Tork Modunda Hız Limit Kaynağı | Rdy | Hemen | 0 | 0 - 1 | Tork Modu | - | ||||||||||
Tork modunda, servonun tork komut kaynağını seçmek için kullanılır.
“☆” VD2F ve VD2L serisi analog girişi (AI) olmadığı için bu fonksiyonu desteklemez. Sadece dahili komutu kullanabilirsiniz. | ||||||||||||||||
P01-10 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Maksimum Hız Sınırı | Run/Rdy | Hemen | 3600 | 0 - 5000 | Koruma ve Sınırlama | rpm | |
Maksimum hız sınır değerini ayarlamak için kullanılır. Motorun gerçek hızı, bu değeri aşarsa Er.32(Motorun maksimum hızını aşma) hatası oluşur. | |||||||
P01-11 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Hız Uyarı Sınırı | Run/Rdy | Hemen | 3300 | 0 - 5000 | Koruma ve Sınırlama | rpm | |
Maksimum hızın sınır değerini ayarlamak için kullanılır. Motorun gerçek hızı bu değeri aşarsa, A-81 (Motorun maksimum hızını aşma) alarmı oluşur. | |||||||
P01-12 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Ileri Yön Hız Sınırı | Run/Rdy | Hemen | 3000 | 0 - 5000 | Koruma ve Sınırlama | rpm | |
| Motorun ileri yöndeki hızın, sınır değerini ayarlamak için kullanılır | |||||||
P01-13 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Geri Yön Hız Sınırı | Run/Rdy | Hemen | 3000 | 0 - 5000 | Koruma ve Sınırlama | rpm | |
| Motorun geri yöndeki hızın, sınır değerini ayarlamak için kullanılır | |||||||
P01-14 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Tork Limit Kaynağı | Rdy | Hemen | 0 | 0 - 1 | Koruma ve Sınırlama | - | ||||||||||
Servo sürücü tork kontrol modundayken tork limit kaynağını seçmek için kullanılır.
| ||||||||||||||||
P01-15 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Ileri Tork Limit | Run/Rdy | Hemen | 3000 | 0 - 3000 | Koruma ve Sınırlama | 0.1% | |
Dahili ileri tork limit değeri. P01-14 parametresi "0" (Dahili Komut) seçildiği zaman aktif olacaktır. | |||||||
P01-16 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Geri Tork Limit | Run/Rdy | Hemen | 3000 | 0 - 3000 | Koruma ve Sınırlama | 0.1% | |
Dahili geri tork limit değeri. P01-14 parametresi "0" (Dahili Komut) seçildiği zaman aktif olacaktır. If the value of P01-15 and P01-16 is set too small, the servo motor may be insufficient torque phenomenon when performing acceleration and deceleration movements. Please refer to 6.4.3 Torque instruction limit. | |||||||
P01-17 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Tork Modunda Ileri Hız Limiti | Run/Rdy | Hemen | 3000 | 0 - 5000 | Koruma ve Sınırlama | rpm | |
Tork kontrol modunda, ileri hız limit değerini ayarlamak için kullanılır. Please refer to 6.4.4 Speed limit in torque mode | |||||||
P01-18 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
| Tork Modunda Geri Hız Limiti | Run/Rdy | Hemen | 3000 | 0 - 5000 | Koruma ve Sınırlama | rpm | |
Tork kontrol modunda, geri hız limit değerini ayarlamak için kullanılır. Please refer to 6.4.4 Speed limit in torque mode | |||||||
P01-19 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Tork Doygunluk Zaman Aşımı | Run/Rdy | Hemen | 3000 | 0 - 65535 | Koruma ve Sınırlama | ms | |
Tork değeri P01-15 veya P01-16 ayar değeri ile sınırlandığında ve ayar süresini aştığında, sürücü “tork doygunluğu anormal” hatası bildirir. ✎Not: Bu fonksiyon kodu 0 olarak ayarlandığında, doygunluk zaman aşımı hata tespiti gerçekleştirilmez ve bu hata göz ardı edilir, | |||||||
P01-21 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Sıfır Hız Kelepçesi Fonksiyon Seçimi | Run/Rdy | Hemen | 0 | 0 to 3 | Hız Modu | - | |||||||||||
Servo sürücü, hız modundayken kullanılabilir. Please refer to 6.3.4 Zero-speed clamp function
| |||||||||||||||||
P01-22 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Sıfır Hız Kelepçesi Hız Eşiği | Run/Rdy | Hemen | 20 | 0 - 5000 | Hız Modu | rpm | |
Servo sürücü, hız modundayken kullanılabilir. 6.3.4 Zero-speed clamp function. | |||||||
P01-23 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Dahili Hız Komutu 1 | Run/Rdy | Hemen | 0 | -5000 - 5000 | Hız Modu | rpm | |||||||||||||||||||||||||||||||||||||
Dahili hız komutu 1'nin hız değerini ayarlamak için kullanılır. Dahili hız komutları, dijital giriş (DI) terminalleri ile kullanılabilir. Dijital giriş parametrelerinde bulunan; 13=INSPD1, 14=INSPD2, 15=INSPD3 seçenekleri ile 8 adete kadar dahili hız tanımlanabilir. Aşağıdaki tabloda dijital girişlerin ON komumları ile hangi hız segmentinin aktif olduğu ilişkisi gösterilmiştir.
Please refer to 6.3.1 Speed instruction input setting | |||||||||||||||||||||||||||||||||||||||||||
P01-24 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Dahili Hız Komutu 2 | Run/Rdy | Hemen | 0 | -5000 - 5000 | Hız Modu | rpm | |
Dahili hız komutu 2'nin hız değerini ayarlamak için kullanılır. | |||||||
P01-25 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Dahili Hız Komutu 3 | Run/Rdy | Hemen | 0 | -5000 - 5000 | Hız Modu | rpm | |
| Dahili hız komutu 3'nin hız değerini ayarlamak için kullanılır. | |||||||
P01-26 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
Dahili Hız Komutu 4 | Run/Rdy | Hemen | 0 | -5000 - 5000 | Hız Modu | rpm | |
| Dahili hız komutu 4'nin hız değerini ayarlamak için kullanılır. | |||||||
P01-27 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Dahili Hız Komutu 5 | Run/Rdy | Hemen | 0 | -5000 - 5000 | Hız Modu | rpm | |
| Dahili hız komutu 5'nin hız değerini ayarlamak için kullanılır. | |||||||
P01-28 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Dahili Hız Komutu 6 | Run/Rdy | Hemen | 0 | -5000 - 5000 | Hız Modu | rpm | |
| Dahili hız komutu 6'nin hız değerini ayarlamak için kullanılır. | |||||||
P01-29 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Dahili Hız Komutu 7 | Run/Rdy | Hemen | 0 | -5000 - 5000 | Hız Modu | rpm | |
| Dahili hız komutu 7'nin hız değerini ayarlamak için kullanılır. | |||||||
P01-30 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Fren Açma Gecikme Süresi | Run/Rdy | Hemen | 250 | 0 - 500 | - | ms | |
Servo RUN olduktan sonra fren çıkışının ON konumuna geçerken ki gecikme süresi için kullanılır. Bu fonksiyonu kullanmak için dijital çıkışa "Fren Çıkışı (BRK-OFF)" atanmalıdır aksi halde BRK-OFF kullanılmadığında bu fonksiyon devre dışı olacaktır. | |||||||
P01-31 | Parameter name | Setting method | Effective time | Default | Range | Category | Unit |
Stationary state. delay from the brake output is OFF to the motor is not energized | Operation setting | Effective immediately | 150 | 1 to 1000 | - | rpm | |
When the motor is in a static state, set the delay time from the brake (BRK-OFF) output is OFF to the servo drive is in the non-powered state. When the brake output (BRK-OFF) is not allocated, this function code has no effect. Please refer to 6.1.8 Brake device. | |||||||
P01-32 | Parameter name | Setting method | Effective time | Default | Range | Category | Unit |
Rotation state, when the brake output is OFF, the speed threshold | Operation setting | Effective immediately | 30 | 0 to 3000 | - | rpm | |
The motor is rotating, the motor speed threshold when the brake (BRK-OFF) is allowed to output OFF. When the brake output (BRK-OFF) is not allocated, this function code has no effect. Please refer to 6.1.8 Brake device. | |||||||
P01-33 | Parameter name | Setting method | Effective time | Default | Range | Category | Unit |
Rotation status, delay from servo enable OFF to brake output OFF | Operation setting | Effective immediately | 500 | 1 to 1000 | - | rpm | |
The motor is rotating, the delay time from the brake (BRK-OFF) output OFF is allowed to the servo enable (S-ON) OFF. When the brake output (BRK-OFF) is not allocated, this function code has no effect. Please refer to 6.1.8 Brake device. | |||||||
P01-37 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
JOG Hızlanma Suresi | Run/Rdy | Hemen | 500 | 1 - 5000 | - | ms | |
JOG komutunun 0'dan 1000 rpm'e hızlanması için geçen süre. ✎Not: VD2L serisi dijital girişler (DI) ile JOG fonksiyonunu desteklemez. Ancak servo üzerinden yapılan JOG için kullanılabilir. | |||||||
P01-38 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
JOG Yavaslama Suresi | Run/Rdy | Hemen | 500 | 1 - 5000 | - | ms | |
JOG komutunun 1000rpm'den 0'a yavaşlaması için geçen süre. ✎Not: VD2L serisi dijital girişler (DI) ile JOG fonksiyonunu desteklemez. Ancak servo üzerinden yapılan JOG için kullanılabilir. | |||||||
Grup P02 Kazanç Parametreleri
P02-01 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
1. Pozisyon Döngü Kazancı | Run/Rdy | Hemen | 232 | 0 - 6200 | Kazanç Kontrol | 0.1Hz | |
Pozisyon kontrol sisteminin yanıt verebilirliğini belirlemek için 1. pozisyon döngüsünün oransal kazancını ayarlayın. | |||||||
P02-02 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
1. Hız Döngü Kazancı | Run/Rdy | Hemen | 250 | 0 - 35000 | Kazanç Kontrol | 0.1Hz | |
Hız döngüsünün duyarlılığını belirlemek için 1. hız döngüsünün oransal kazancını ayarlayın. | |||||||
P02-03 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 1. Hız Döngüsü Integral Zaman Sabiti | Run/Rdy | Hemen | 210 | 100 - 65535 | Kazanç Kontrol | 0.1ms | |
1. hız döngüsü integral sabitini ayarlayın. Ayarlanan değer ne kadar küçük olursa, integral etkisi o kadar güçlü olur. | |||||||
P02-04 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 2. Pozisyon Döngü Kazancı | Run/Rdy | Hemen | 35 | 0 - 6200 | Kazanç Kontrol | 0.1Hz | |
| Pozisyon kontrol sisteminin yanıt verebilirliğini belirlemek için 2. pozisyon döngüsünün oransal kazancını ayarlayın. | |||||||
P02-05 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 2. Hız Döngü Kazancı | Run/Rdy | Hemen | 65 | 0 - 35000 | Kazanç Kontrol | 0.1Hz | |
| Hız döngüsünün duyarlılığını belirlemek için 2. hız döngüsünün oransal kazancını ayarlayın. | |||||||
P02-06 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 2. Hız Döngüsü Integral Zaman Sabiti | Run/Rdy | Hemen | 1000 | 100 - 65535 | Kazanç Kontrol | 0.1ms | |
| 2. hız döngüsü integral sabitini ayarlayın. Ayarlanan değer ne kadar küçük olursa, integral etkisi o kadar güçlü olur. | |||||||
P02-07 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2.Kazanç Değiştirme Modu | Run/Rdy | Hemen | 1 | 0 - 1 | Kazanç Kontrol | - | |||||||
İkinci kazanç değerlerine geçmek için kullanılır.
| |||||||||||||
P02-08 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Kazanç Değiştirme Koşulu | Run/Rdy | Hemen | 0 | 0 - 10 | Kazanç Kontrol |
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Set the conditions for gain switching.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
P02-13 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
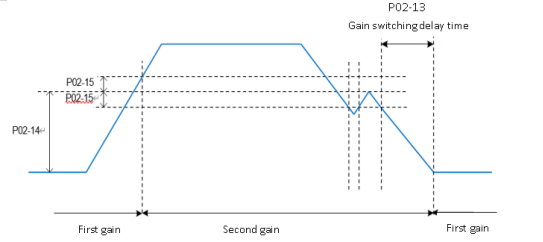
| Kazanç Değiştirme için Gecikme Süresi | Run/Rdy | Hemen | 20 | 0 - 10000 | Kazanç Kontrol | 0.1ms | |
İkinci kazancın birinci kazanca geri dönmesi için gereken anahtarlama koşulunun süresi.
✎Not: Bu parametre yalnızca ikinci kazanç birinci kazanca geri döndürüldüğünde geçerlidir. | |||||||
P02-14 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
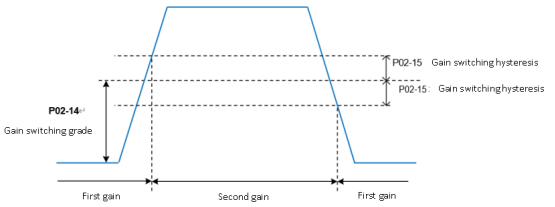
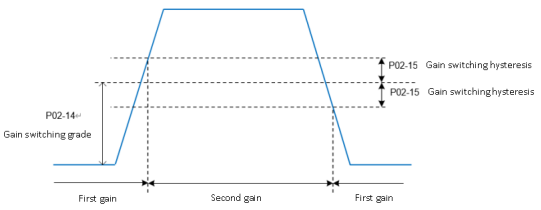
Kazanç Anahtarlama Derecesi | Run/Rdy | Hemen | 50 | 0 - 20000 | Kazanç Kontrol | Anahtarlama koşullarına göre | |
Kazanç koşulunun derecesini ayarlayın. Anlık anahtarlama işleminin oluşması, derece ve histerezisin iki koşulundan etkilenir.
| |||||||
P02-15 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Kazanç Anahtarlama Histerezisi | Run/Rdy | Hemen | 20 | 0 - 20000 | Kazanç Kontrol | Anahtarlama koşullarına göre | |
Kazanç anahtarlama koşulunu elde etmek için histerezisi ayarlayın.
| |||||||
P02-16 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
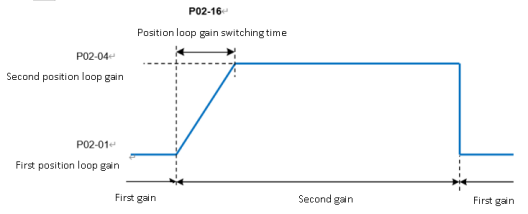
| Pozisyon Döngüsü Kazanç Anahtarlama Süresi | Run/Rdy | Hemen | 30 | 0 - 10000 | Kazanç Kontrol | 0.1ms | |
Pozisyon kontrol modunda birinci pozisyon döngüsünden (P02-01) ikinci pozisyon döngüsüne (P02-04) geçiş için zamanı ayarlayın.
P02-04≤P02-01 ise, P02-16 geçersizdir ve ikinci kazanç birinci kazanca hemen değiştirilir. | |||||||
P02-20 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Model Izleme Kontrol Fonksiyonunu Etkinleştirin | Rdy | Hemen | 0 | 0 - 1 | Kazanç Kontrol |
| |
| Model izleme kontrol fonksiyonunu etkinleştirmek için 1 olarak ayarlayın. | |||||||
P02-21 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Model Izleme Kontrol Kazancı | Rdy | Hemen | 1000 | 200 - 20000 | Kazanç Kontrol | 0.1/s | |
| Model izleme kontrol kazancının artırılması, model döngüsünün pozisyon tepki performansını iyileştirebilir. Kazanç çok yüksekse, aşma davranışına neden olabilir. | |||||||
P02-22 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Model Izleme Kontrolü Kazanç Kompanzasyonu | Rdy | Hemen | 1000 | 500 - 2000 | Kazanç Kontrol | 0.10% | |
| Kazanç kompanzasyonu model döngüsünün sönümleme oranını etkiler ve kazanç kompanzasyonu büyüdükçe sönümleme oranı da büyür. | |||||||
P02-23 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Model Izleme Kontrolü Ileri Rotasyon Sapması | Run/Rdy | Hemen | 1000 | 0 - 10000 | Kazanç Kontrol | 0.10% | |
| Model izleme kontrolü altında pozitif yönde tork ileri besleme büyüklüğü. | |||||||
P02-24 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Model Izleme Kontrolü Rotasyon Sapmasını Tersine Cevirir | Run/Rdy | Hemen | 1000 | 0 - 10000 | Kazanç Kontrol | 0.10% | |
| Model izleme kontrolü altında ters yönde tork ileri besleme büyüklüğü. | |||||||
P02-25 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Model Izleme Kontrolü Hız Ileri Besleme Kompanzasyonu | Run/Rdy | Hemen | 1000 | 0 - 10000 | Kazanç Kontrol | 0.10% | |
| Model izleme kontrolü altında hız ileri beslemesinin büyüklüğü. | |||||||
Grup P03 Self-adjusting parameters
P03-01 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Yük Atalet Oranı | Run/Rdy | Hemen | 300* | 100 - 10000 | Otomatik Parametre Ayarı | 0.01 | |
Yük atalet oranını ayarlayın: 0.01 ila 100.00 kez. “*” Farklı modeller için fabrika varsayılanlarının farklı olabileceğini gösterir. | |||||||
P03-02 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Yük Sertlik Derecesi Seçimi | Run/Rdy | Hemen | 14* | 0 - 31 | Otomatik Parametre Ayarı | - | |
| Servo sistemin sertliğini ayarlayın. Değer ne kadar yüksek olursa yanıt o kadar hızlı olur, ancak çok yüksek sertlik titreşime ve sese neden olabilirr. “*” farklı modeller için fabrika varsayılanlarının farklı olabileceğini gösterir. | |||||||
P03-03 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Otomatik Parametre Ayarlarının Modu | Run/Rdy | Hemen | 0 | 0 - 2 | Otomatik Parametre Ayarı | - | |||||||||||||
Farklı kazanç ayar modları ayarlanabilir ve ilgili kazanç parametreleri manuel olarak veya sertlik seviyesi tablosuna göre otomatik olarak ayarlanabilir.
| |||||||||||||||||||
P03-04 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Online Atalet Tanımlama Hassasiyeti | Run/Rdy | Hemen | 0 | 0 - 2 | Otomatik Parametre Ayarı | - | |
Etkin değil. | |||||||
P03-05 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Atalet Tanımlama Tur Sayısı | Rdy | Hemen | 2 | 1 - 20 | Otomatik Parametre Ayarı | Tur | |
| Çevrimdışı yük ataleti tanımlama işlemi için motor dönüş sayısı. | |||||||
P03-06 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Atalet Tanımlama Maksimum Hızı | Rdy | Hemen | 1000 | 300 - 2000 | Otomatik Parametre Ayarı | rpm | |
| Çevrimdışı atalet tanımlama modunda izin verilen maksimum motor hızı talimatını ayarlayın. Atalet tanıma sırasında hız ne kadar yüksek olursa, tanıma sonucu o kadar doğru olacaktır. Varsayılan değeri korumanız tavsiye edilir. | |||||||
P03-07 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Tanımlama için Dönüş Yönü | Rdy | Hemen | 0 | 0 - 2 | Otomatik Parametre Ayarı | - | |||||||||
Parametre tanımlama için dönüş yönünü ayarlayın
| |||||||||||||||
P03-08 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Tanımlama Bekleme Süresi | Rdy | Hemen | 1000 | 300 - 10000 | Otomatik Parametre Ayarı | ms | |
| Çevrimdışı atalet tanımlama sırasında, iki ardışık hız talimatı arasındaki zaman aralığı | |||||||
Grup P04 Vibrasyon Önleme
P04-01 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Pulse Talimatı Filtreleme Yöntemi | Rdy | Hemen | 0 | 0 - 1 | Pozisyon Modu | - | |||||||
| |||||||||||||
P04-02 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|
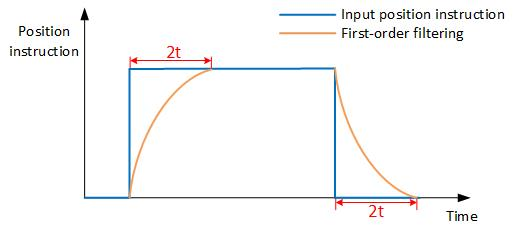
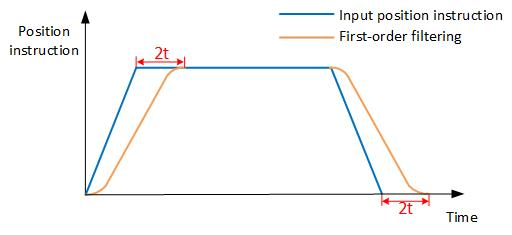
| Pozisyon Talimatları Alçak Geçiren Filtreleme Zaman Sabiti | Rdy | Hemen | 0 | 0 - 1000 | Pozisyon Modu | ms | |||||
Pozisyon talimatları için alçak geçiren filtreleme zaman sabitini ayarlamak için kullanılır.
| |||||||||||
P04-03 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|
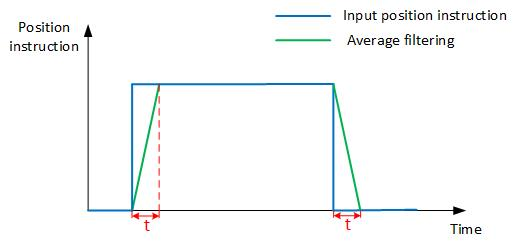
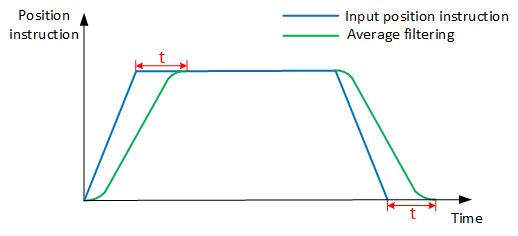
| Pozisyon Talimatı Ortalama Filtreleme Zaman Sabiti | Rdy | Hemen | 0 | 0 - 128 | Pozisyon Modu | ms | |||||
Ortalama filtreleme zaman sabitini ayarlamak için kullanılır.
| |||||||||||
P04-04 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Tork Filtreleme Zaman Sabiti | Run/Rdy | Hemen | 80 | 10 - 2500 | Vibrasyon Önleme | 0.01ms | |
Tork filtreleme zaman sabitini ayarlamak için kullanılır. P03-03 (Kendi kendini ayarlama modu seçimi) fonksiyon kodu 0 olarak ayarlandığında, parametre servo tarafından otomatik olarak ayarlanır. Please refer to 6.4.2 Torque instruction filtering | |||||||
P04-05 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Birinci Çentik(Notch) Filtre Frekansı | Run/Rdy | Hemen | 300 | 250 - 5000 | Vibrasyon Önleme | Hz | |
Birinci çentik(notch) filtresinin merkez frekansını ayarlayın. Fonksiyon kodu 5000 olarak ayarlandığında, çentik (notch) filtresinin fonksiyonu geçersizdir. | |||||||
P04-06 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Birinci Çentik(Notch) Filtre Derinliği | Run/Rdy | Hemen | 100 | 0 - 100 | Vibrasyon Önleme | - | |
Çentik(Notch) filtresi derinlik derecesini ayarlayın (çentik filtresinin merkez frekansında giriş ve çıkış arasındaki oran) Bu fonksiyon kodunun ayar değeri ne kadar büyük olursa, çentik filtresi derinliği o kadar küçük olur ve mekanik titreşimin bastırma etkisi o kadar zayıf olur. Çok büyük ayarlanması sistem kararsızlığına neden olabilir. Please refer to 7.4.2 Notch filter | |||||||
P04-07 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Birinci Çentik(Notch) Filtre Genişliği | Run/Rdy | Hemen | 4 | 0 - 12 | Vibrasyon Önleme | - | |
| Çentik(notch) filtresi genişlik derecesini ayarlayın (çentik filtresinin merkez frekansında giriş ve çıkış arasındaki oran) | |||||||
P04-08 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
İkinci Çentik(Notch) Filtre Frekansı | Run/Rdy | Hemen | 500 | 250 - 5000 | Vibrasyon Önleme | Hz | |
Ikinci çentik(notch) filtresinin merkez frekansını ayarlayın. Fonksiyon kodu 5000 olarak ayarlandığında, çentik (notch) filtresinin fonksiyonu geçersizdir. | |||||||
P04-09 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| İkinci Çentik(Notch) Filtre Derinliği | Run/Rdy | Hemen | 100 | 0 - 100 | Vibrasyon Önleme | - |
P04-10 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| İkinci Çentik(Notch) Filtre Genişliği | Run/Rdy | Hemen | 4 | 0 - 12 | Vibrasyon Önleme | - |
P04-11 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Düşük Frekans Vibrasyon Önleme Fonksiyonunu Etkiinleştirme | Run/Rdy | Hemen | 0 | 0 - 1 | Vibrasyon Önleme |
| |
| Fonksiyon kodu 1 olarak ayarlandığında, düşük frekanslı vibrasyon önleme fonksiyonunu etkinleştirir. | |||||||
P04-12 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Düşük Frekanslı Vibrasyon Önleme Frekansı | Run/Rdy | Hemen | 800 | 10 - 2000 | Vibrasyon Önleme | 0.1H |
P04-14 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Kapanma Vibrasyon Algılama Genişliği | Run/Rdy | Hemen | 100 | 0 - 3000 | Vibrasyon Önleme | 0.001 | |
| Vibrasyon genliği, algılama genliği oranından büyük olduğunda, düşük frekanslı vibrasyon frekansı tanınabilir ve U0-16 monitör miktarına güncellenir. Fonksiyon kodu, titreşim frekansının tanınmasını etkileyecek kadar büyük veya çok küçük ayarlanmıştır. | |||||||
P04-18 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Hız Geri Bildirim Filtreleme Süresi | Run/Rdy | Hemen | 40 | 20 - 1000 | Vibrasyon Önleme | 0.01ms | |
| Enkoderin geri besleme hızının dalga filtrelemesi. Filtreleme süresi büyük ayarlandığında, motorun titremesine neden olabilir. | |||||||
P04-19 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| A Tipi Bastırma Fonksiyonunu Etkinleştirme | Run/Rdy | Hemen | 0 | 0 - 1 | Vibrasyon Önleme |
| |
| Fonksiyon kodu 1 olarak ayarlandığında, A tipi bastırma fonksiyonunu etkinleştirin. | |||||||
P04-20 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Tip A Bastırma Frekansı | Run/Rdy | Hemen | 1000 | 100 - 20000 | Vibrasyon Önleme | 0.1HZ | |
| A Tipi bastırma sıklığını ayarlayın. | |||||||
P04-21 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Tip A Bastırma Kazancı Düzeltmesi | Run/Rdy | Hemen | 100 | 0 - 1000 | Vibrasyon Önleme | 0.01 | |
| Yük atalet oranı boyutunu düzeltin. | |||||||
P04-22 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Tip A Bastırma Sönümleme Kazancı | Run/Rdy | Hemen | 0 | 0 - 500 | Vibrasyon Önleme | 0.01 | |
| A tipi direnç telafisi değeri, titreşim kabul edilebilir aralığa düşene kadar kademeli olarak artırılır. | |||||||
P04-23 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Tip A Bastırma Faz Düzeltmesi | Run/Rdy | Hemen | 200 | 0 - 900 | Vibrasyon Önleme | 0.1 derece | |
| Tip A bastırma faz kompanzasyonu. | |||||||
Grup P05 Sinyal Girişi ve Çıkışı
P05-01☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Analog Giriş 1 (AI1) Gerilim Sapması | Run/Rdy | Hemen | 0 | -5000 - 5000 | Analog Giriş | mV | |
Analog Giriş 1 kanalının gerilim sapma değerini ayarlama
“☆” VD2F servo sürücü bu fonksiyonu desteklemez. | |||||||
P05-02☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Analog Giriş 1(AI1) giriş filtresi zaman sabiti | Run/Rdy | Hemen | 200 | 0 - 60000 | Analog Giriş | 0.01ms | |
AI_1 kanal girişi alçak geçiren filtre zaman sabitini ayarlamak için kullanılır. “☆” VD2F servo sürücü bu fonksiyonu desteklemez. | |||||||
P05-03☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
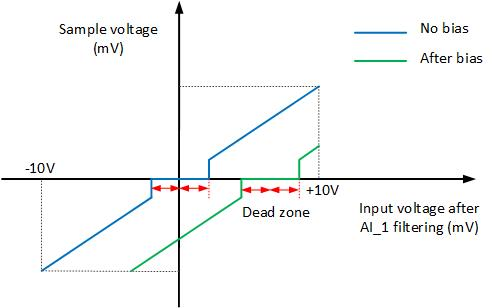
Analog Giriş1 (AI1) Ölü Bölge | Run/Rdy | Hemen | 20 | 0 - 1000 | Analog Giriş | mV | |
AI_1 kanalının ölü bölge değerini ayarlayın. “Ölü bölge”, örnek gerilimi 0 olduğunda giriş gerilimi aralığıdır.
“☆” VD2F servo sürücü bu fonksiyonu desteklemez. | |||||||
P05-04☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
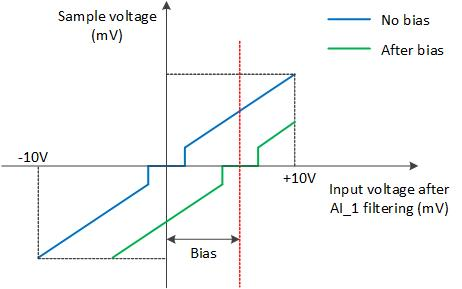
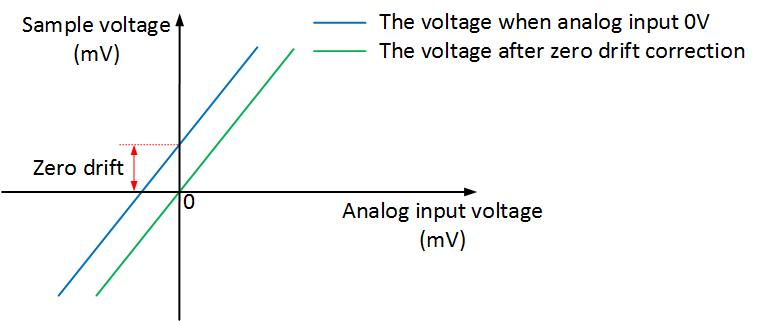
Analog Giriş 1 (AI1) Sıfır Kaydırma | Run/Rdy | Hemen | 0 | -500 - 500 | Analog Giriş | mV | |
AI1,analoğunun sıfır sapmasını ayarlayın. “Sıfır Kaydırma”, Analog değer 0V olduğu halde ölçülen değer farklıysa bu parametre ile gerilimi 0V'a kaydırma işlemi yapılabilir.
“☆” VD2F servo sürücünün bu fonksiyon kodunu desteklemediğini gösterir. | |||||||
P05-05☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Analog Giriş 2 (AI2) Gerilim Sapması | Run/Rdy | Hemen | 0 | -5000 - 5000 | Analog Giriş | mV | |
| “☆” VD2F servo sürücü bu fonksiyonu desteklemez. | |||||||
P05-06☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Analog Giriş 2(AI2) giriş filtresi zaman sabiti | Run/Rdy | Hemen | 200 | 0 - 60000 | Analog Giriş | 0.01ms | |
| “☆” VD2F servo sürücü bu fonksiyonu desteklemez. | |||||||
P05-07☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Analog Giriş2 (AI2) Ölü Bölge | Run/Rdy | Hemen | 20 | 0 - 1000 | Analog Giriş | mV | |
| “☆” VD2F servo sürücü bu fonksiyonu desteklemez. | |||||||
P05-08☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Analog Giriş 2 (AI2) Sıfır Kaydırma | Run/Rdy | Hemen | 0 | -500 - 500 | Analog Giriş | mV | |
| “☆” VD2F servo sürücü bu fonksiyonu desteklemez. | |||||||
P05-09☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
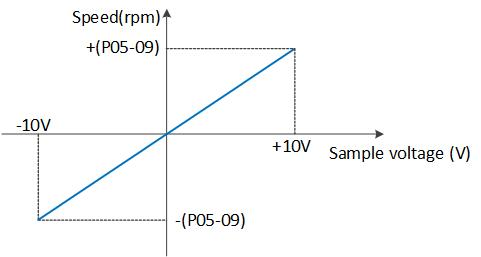
| 10V Analog Değerin Hız Karşılığı | Rdy | Hemen | 3000 | 1000 - 4500 | Analog Giriş | rpm | |||||||
Analog değer 10V olduğunda karşılık gelen hız değerini ayarlayın.
Hız = Analog Değer(V)/ 10 * (P05-09) “☆” VD2F servo sürücü bu fonksiyonu desteklemez. | |||||||||||||
P05-10☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
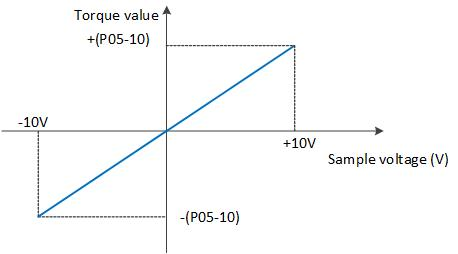
| 10V Analog Değerin Tork Karşılığı | Rdy | Hemen | 1000 | 0 - 3000 | Analog Giriş | 0.1% | |||||||
Analog değer 10V olduğunda karşılık gelen tork değerini ayarlayın.
Tork = Analog Değer(V)/ 10 * (P05-10) “☆” VD2F servo sürücü bu fonksiyonu desteklemez. | |||||||||||||
P05-11 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Pozisyon Tamamlama,Pozisyona Yaklaşma Şart Ayarları | Run/Rdy | Hemen | 0 | 0 - 3 | Pozisyon Modu | - | |||||||||||
Pozisyon tamamlama ve pozisyona yaklaşma şartlarını ayarlayın. Servo pozisyon modundayken ve pozisyon sapmasının mutlak değeri P05-12 (pozisyon tamamlama eşiği) veya P05-13 (pozisyona yaklaşma eşiği) aralığında olduğunda, servo pozisyon tamamlandı sinyali ve pozisyona yaklaşma sinyali verir.
| |||||||||||||||||
P05-12 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Pozisyon Tamamlama Eşiği | Run/Rdy | Hemen | 800 | 1 - 65535 | Pozisyon Modu | Pulse Birimi | |
| Servo sürücü posizyon tamamlama çıkışı verdiğinde, pozisyon sapmasının mutlak değer eşiğini ayarlayın. | |||||||
P05-13 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Pozisyona Yaklaşma Eşiği | Run/Rdy | Hemen | 5000 | 1 - 65535 | Pozisyon Modu | Pulse Birimi | |
Servo sürücü posizyona yaklaşıldı çıkışı verdiğinde, pozisyon sapmasının mutlak değer eşiğini ayarlayın. | |||||||
P05-14 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Pozisyon Algılama Aralık Süresi | Run/Rdy | Hemen | 10 | 0 - 20000 | Pozisyon Modu | ms | |
| Pozisyonlama tamamlanması için algılama aralık süresini ayarlayın. | |||||||
P05-15 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Pozisyon Sinyal Tutma Süresi | Run/Rdy | Hemen | 100 | 0 - 20000 | Pozisyon Modu | ms | |
| P05-11=3 ( Pozisyon tamamlama ve pozisyon yaklaşma koşulu ayarı) olduğunda pozisyonlamadan sonra sinyalin yürürlükte kalacağı süreyi ayarlayın | |||||||
P05-16 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
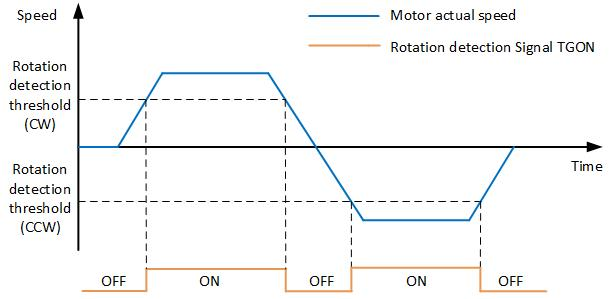
Dönüş Algılama Hızı | Run/Rdy | Hemen | 20 | 0 - 1000 | Hız Modu | rpm | |
Motor dönüş sinyalini (TGON) tetikleyen hız eşiğini ayarlayın. Motor dönüş sinyali (TGON) motorun döndüğünü onaylamak için kullanılır. Motorun hızı belirlenen değere ulaştığında TGON sinyali aktif olacaktır. Please refer to 6.3.5 Speed-related DO output function
| |||||||
P05-17 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
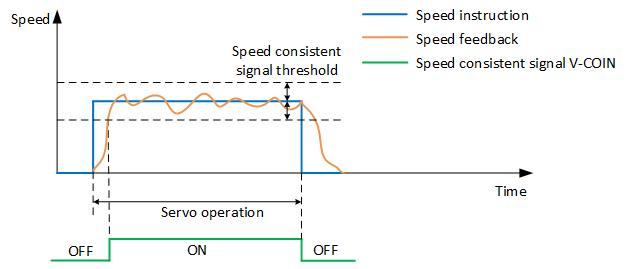
| Hız Sabit Sinyali | Run/Rdy | Hemen | 10 | 0 - 100 | Hız Modu | rpm | |
Motorun hızının sabit olduğu sinyalini tetikleyen hız eşiğini ayarlayın. Motor hızının sabit sinyalini (V-COIN), gerçek hızın hız talimatı ayar değerine ulaştığını gösterir. Please refer to 6.3.5 Speed-related DO output function
| |||||||
P05-18 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
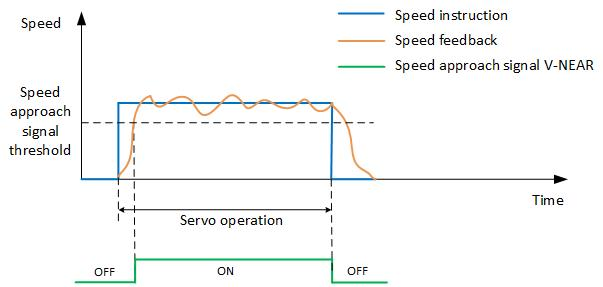
Hıza Yaklaşma Sinyali | Run/Rdy | Hemen | 100 | 10 - 6000 | Hız Modu | rpm | |
Motor hızına yaklaşıldı sinyalini tetikleyen hız eşiğini ayarlayın. Motor hızı yaklaşma sinyali (V-NEAR) motor hızının ayarlanan değere ulaştığını gösterir. Please refer to 6.3.5 Speed-related DO output function
| |||||||
P05-19 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
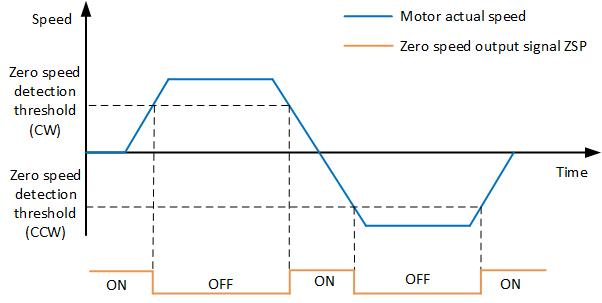
| Sıfır Hız Çıkış Sinyali Eşiği | Run/Rdy | Hemen | 10 | 0 - 6000 | Hız Modu | rpm | |
Motor sıfır hız çıkış sinyalini tetikleyen hız eşiğini ayarlayın. Motor hızının, sıfır hız sinyali eşiği (ZSP) için belirlenen değere göre çıkış sinyali
Please refer to 6.3.5 Speed-related DO output function | |||||||
P05-20 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Tork Varış Eşiği | Run/Rdy | Hemen | 100 | 0 - 300 | Tork Modu | % | |
Please refer to 6.4.5 Torque-related DO output functions | |||||||
P05-21 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Tork Varış Histerezis Değeri | Run/Rdy | Hemen | 10 | 0 - 20 | Tork Modu | % | |
Please refer to 6.4.5 Torque-related DO output functions | |||||||
P06 Terminal Parametreleri (DI/DO)
P06-02 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
DI1 Fonksiyon Seçimi | Run/Rdy | Servo Restart Edilmeli | 1 | 0 - 32 | Terminal | - | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Dijital Giriş1 (DI1) için fonksiyon ayarlama parametresidir.
P06-02 Parametresi tabloda gösterilen değerler dışında bir değer ayarlanırsa giriş geçersiz olacaktır. Ayarlanan dijital giriş (DI) fonksiyonu başka DI ile aynı fonksiyona ayarlanamaz aksi halde servo A-89 uyarısı verecektir. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
P06-03 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
DI1 Kontak Seçimi | Run/Rdy | Hemen | 0 | 0 - 1 | Terminal | - | ||||||||||
DI1 kontağını NO (Normalde Açık) veya NC (Normalde Kapalı) olarak ayarlamak için kullanılır.
| ||||||||||||||||
P06-04 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
DI1 Kaynak Seçimi | Run/Rdy | Hemen | 0 | 0 - 1 | Terminal | - | |||||||
DI1 portunu fiziksel veya sanal olarak kontrol etmek için kullanılır.
| |||||||||||||
P06-05 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI2 Fonksiyon Seçimi | Run/Rdy | Servo Restart Edilmeli | 2 | 0 - 32 | Terminal | - | |
Dijital Giriş2 (DI2) için fonksiyon ayarlama parametresidir. P06-02 parametresinde gösterilen tablodan seçim yapılabilir. | |||||||
P06-06 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI2 Kontak Seçimi | Run/Rdy | Hemen | 0 | 0 - 1 | Terminal | - | |
DI2 kontağını NO (Normalde Açık) veya NC (Normalde Kapalı) olarak ayarlamak için kullanılır. P06-03 parametresinde kullanımı açıklanmıştır. | |||||||
P06-07 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI2 Kaynak Seçimi | Run/Rdy | Hemen | 0 | 0 - 1 | Terminal | - | |
DI2 portunu fiziksel veya sanal olarak kontrol etmek için kullanılır. P06-04 parametresinde kullanımı açıklanmıştır. | |||||||
P06-08 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI3 Fonksiyon Seçimi | Run/Rdy | Servo Restart Edilmeli | 2 | 0 - 32 | Terminal | - | |
Dijital Giriş3 (DI3) için fonksiyon ayarlama parametresidir. P06-02 parametresinde gösterilen tablodan seçim yapılabilir. | |||||||
P06-09 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI3 Kontak Seçimi | Run/Rdy | Hemen | 0 | 0 - 1 | Terminal | - | |
DI3 kontağını NO (Normalde Açık) veya NC (Normalde Kapalı) olarak ayarlamak için kullanılır. P06-03 parametresinde kullanımı açıklanmıştır. | |||||||
P06-10 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI3 Kaynak Seçimi | Run/Rdy | Hemen | 0 | 0 - 1 | Terminal | - | |
DI3 portunu fiziksel veya sanal olarak kontrol etmek için kullanılır. P06-04 parametresinde kullanımı açıklanmıştır. | |||||||
P06-11 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI4 Fonksiyon Seçimi | Run/Rdy | Servo Restart Edilmeli | 2 | 0 - 32 | Terminal | - | |
Dijital Giriş4 (DI4) için fonksiyon ayarlama parametresidir. P06-02 parametresinde gösterilen tablodan seçim yapılabilir. | |||||||
P06-12 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI4 Kontak Seçimi | Run/Rdy | Hemen | 0 | 0 - 1 | Terminal | - | |
DI4 kontağını NO (Normalde Açık) veya NC (Normalde Kapalı) olarak ayarlamak için kullanılır. P06-03 parametresinde kullanımı açıklanmıştır. | |||||||
P06-13 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI4 Kaynak Seçimi | Run/Rdy | Hemen | 0 | 0 - 1 | Terminal | - | |
DI4 portunu fiziksel veya sanal olarak kontrol etmek için kullanılır. P06-04 parametresinde kullanımı açıklanmıştır. | |||||||
P06-14 ☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI5 Fonksiyon Seçimi | Run/Rdy | Servo Restart Edilmeli | 2 | 0 - 32 | Terminal | - | |
Dijital Giriş5 (DI5) için fonksiyon ayarlama parametresidir. P06-02 parametresinde gösterilen tablodan seçim yapılabilir. “☆” VD2F ve VD2L desteklemez | |||||||
P06-15 ☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI5 Kontak Seçimi | Run/Rdy | Hemen | 0 | 0 - 1 | Terminal | - | |
DI5 kontağını NO (Normalde Açık) veya NC (Normalde Kapalı) olarak ayarlamak için kullanılır. P06-03 parametresinde kullanımı açıklanmıştır. “☆” VD2F ve VD2L desteklemez | |||||||
P06-16 ☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI5 Kaynak Seçimi | Run/Rdy | Hemen | 0 | 0 - 1 | Terminal | - | |
DI5 portunu fiziksel veya sanal olarak kontrol etmek için kullanılır. P06-04 parametresinde kullanımı açıklanmıştır. “☆” VD2F ve VD2L desteklemez | |||||||
P06-17 ☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI6 Fonksiyon Seçimi | Run/Rdy | Servo Restart Edilmeli | 2 | 0 - 32 | Terminal | - | |
Dijital Giriş6 (DI6) için fonksiyon ayarlama parametresidir. P06-02 parametresinde gösterilen tablodan seçim yapılabilir. “☆” VD2F ve VD2L desteklemez | |||||||
P06-18 ☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI6 Kontak Seçimi | Run/Rdy | Hemen | 0 | 0 - 1 | Terminal | - | |
DI6 kontağını NO (Normalde Açık) veya NC (Normalde Kapalı) olarak ayarlamak için kullanılır. P06-03 parametresinde kullanımı açıklanmıştır. “☆” VD2F ve VD2L desteklemez | |||||||
P06-19 ☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI6 Kaynak Seçimi | Run/Rdy | Hemen | 0 | 0 - 1 | Terminal | - | |
DI6 portunu fiziksel veya sanal olarak kontrol etmek için kullanılır. P06-04 parametresinde kullanımı açıklanmıştır. “☆” VD2F ve VD2L desteklemez | |||||||
P06-20 ☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI7 Fonksiyon Seçimi | Run/Rdy | Servo Restart Edilmeli | 2 | 0 - 32 | Terminal | - | |
Dijital Giriş7 (DI7) için fonksiyon ayarlama parametresidir. P06-02 parametresinde gösterilen tablodan seçim yapılabilir. “☆” VD2F ve VD2L desteklemez | |||||||
P06-21 ☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI7 Kontak Seçimi | Run/Rdy | Hemen | 0 | 0 - 1 | Terminal | - | |
DI7 kontağını NO (Normalde Açık) veya NC (Normalde Kapalı) olarak ayarlamak için kullanılır. P06-03 parametresinde kullanımı açıklanmıştır. “☆” VD2F ve VD2L desteklemez | |||||||
P06-22 ☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI7 Kaynak Seçimi | Run/Rdy | Hemen | 0 | 0 - 1 | Terminal | - | |
DI7 portunu fiziksel veya sanal olarak kontrol etmek için kullanılır. P06-04 parametresinde kullanımı açıklanmıştır. “☆” VD2F ve VD2L desteklemez | |||||||
P06-23 ☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI8 Fonksiyon Seçimi | Run/Rdy | Servo Restart Edilmeli | 2 | 0 - 32 | Terminal | - | |
Dijital Giriş8 (DI8) için fonksiyon ayarlama parametresidir. P06-02 parametresinde gösterilen tablodan seçim yapılabilir. “☆” VD2F ve VD2L desteklemez | |||||||
P06-24 ☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI8 Kontak Seçimi | Run/Rdy | Hemen | 0 | 0 - 1 | Terminal | - | |
DI8 kontağını NO (Normalde Açık) veya NC (Normalde Kapalı) olarak ayarlamak için kullanılır. P06-03 parametresinde kullanımı açıklanmıştır. “☆” VD2F ve VD2L desteklemez | |||||||
P06-25 ☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
DI8 Kaynak Seçimi | Run/Rdy | Hemen | 0 | 0 - 1 | Terminal | - | |
DI8 portunu fiziksel veya sanal olarak kontrol etmek için kullanılır. P06-04 parametresinde kullanımı açıklanmıştır. “☆” VD2F ve VD2L desteklemez | |||||||
P06-26 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
DO1 Fonksiyon Seçimi | Run/Rdy | Hemen | 132 | 128 - 148 | Terminal | - | |||||||||||||||||||||||||||||||||||||||||||||||||
Dijital Giriş1 (DI1) için fonksiyon ayarlama parametresidir.
If P06-26 is set to a value other than that in the preceding table, the DO port function is not required The same DO channel function could not be allocated to multiple DO ports, otherwise servo drive will occur A-90 (DO port configuration duplication) “✎1”: Use the function code BRK-OFF would be effective after power on again. “✎2”: ① Only VD2H, VD2L and VD2F support 143 function code. For VD2-0xxSA1G model, this function code is empty. 143 function code would be effective after power on again. ② Only for VD2-0xxSA1H model, DO_1 default function code is 130ALM (fault signal). Only for VD2-0xxSA1H model, DO_2, DO_3, DO_4 function code is 143 OZ (Z/A/B pulse output), these 3 channels correspond to the Z, A and B phase of the pulse output. ③ For VD2L-0xxSa1P model, DO_2, DO_3 and DO_4 function code is 143 OZ/A/B (Z pulse/pulse/direction output). These 2 channels corresponds to Z axis, pulse axis and direction axis. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
P06-27 | Parameter name | Setting method | Effective time | Default | Range | Category | Unit | ||||||
DO_1 channel logic selection | Operation setting | Effective immediately | 0 | 0 to 1 | DI/DO | - | |||||||
DO Port input logic validity function selection.
| |||||||||||||
P06-28 | Parameter name | Setting method | Effective time | Default | Range | Category | Unit |
DO_2 channel function selection | Operation setting | Effective immediately | 130 | 128 to 148 | DI/DO | - |
P06-29 | Parameter name | Setting method | Effective time | Default | Range | Category | Unit |
DO_2 channel logic selection | Operation setting | Effective immediately | 0 | 0 to 1 | DI/DO | - |
P06-30 | Parameter name | Setting method | Effective time | Default | Range | Category | Unit |
DO_3 channel function selection | Operation setting | Effective immediately | 129 | 128 to 148 | DI/DO | - |
P06-31 | Parameter name | Setting method | Effective time | Default | Range | Category | Unit |
DO_3 channel logic selection | Operation setting | Effective immediately | 0 | 0 to 1 | DI/DO | - |
P06-32 | Parameter name | Setting method | Effective time | Default | Range | Category | Unit |
DO_4 channel function selection | Operation setting | Effective immediately | 134 | 128 to 148 | DI/DO | - |
P06-33 | Parameter name | Setting method | Effective time | Default | Range | Category | Unit |
DO_4 channel logic selection | Operation setting | Effective immediately | 0 | 0 to 1 | DI/DO | - |
Grup P07 Multi-Segment Pozisyon
P07-01 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Multi-Segment Pozisyon Modu | Rdy | Hemen | 0 | 0 - 2 | - | - | |||||||||||||
Servo pozisyon modunda ve P01-06 (pozisyon komut kaynağı) =1 iken, çok segmentli pozisyonun çalışma modunu ayarlayın.
Multi segmentli pozisyon fonksiyonunu kullanmak için, servo sürücünün bir DI port kanalı fonksiyon 20 (ENINPOS, dahili çok segmentli pozisyon etkinleştirme sinyali) olarak yapılandırılmalı ve DI terminali aktif olmalıdır. Please refer to Group P06 DI/DO configuration | |||||||||||||||||||
P07-02 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Başlangıç Segment Numarası | Rdy | Hemen | 1 | 1 - 16 | - | - | |||||||||||||||||||||||||||||||
Tek sefer çalışma veya döngüsel çalışma modu için başlangıç segment numarasını ayarlayın. P07-01≠2 olduğunda, segment artışı otomatik olarak gerçekleşir. P07-01=2 olduğunda, dijital inputların parametre fonksiyonları INPOS1 (21),INPOS2 (22),INPOS3 (23),INPOS4 (24) şeklinde ayarlanmalıdır. Multi segment numarası 4 bitlik ikili sayı sistemi ile belirlenir. Dahili multi-segmentin pozisyon numarası aşağıdaki tabloda belirtilen sistemle belirlenir.
| |||||||||||||||||||||||||||||||||||||
P07-03 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Bitiş Segment Numarası | Rdy | Hemen | 1 | 1 - 16 | - | - | |
Tek sefer çalışma veya dögüsel çalışma modları için son segment numarasını ayarlayın. | |||||||
P07-04 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Segment Tutma Modu | Rdy | Hemen | 0 | 0 - 1 | - | - | ||||||||||
The starting segment number used for the servo drive will run when it resumes after pausing in multi-segment. “Pause” indicates that internal multi-segment position enable signal changes from valid to invalid.
Once paused during multi-segment position operation, the servo drive will abandon the unfinished position instructions in this segment and shutdown. Please refer to Margin handling method | ||||||||||||||||
P07-05 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Multi-Segment Pozisyon Modu | Rdy | Hemen | 0 | 0 - 1 | - | - | ||||||||||
Multi segmentli pozisyon fonksiyonunun pozisyon modunu ayarlayın.
| ||||||||||||||||
P07-06 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Bekleme Zaman Birimi | Rdy | Hemen | 0 | 0 - 1 | - | - | |||||||
Multi-segment pozisyon fonksiyonunun bekleme süre birimini ayarlayın. “Bekleme Süresi” bir komutun sonu ile bir sonraki komutun başlangıcı arasındaki bekleme aralığıdır.
| |||||||||||||
P07-09 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 1.Segment Pozisyon | Run/Rdy | Hemen | 10000 | -2147483647 - 2147483646 | - | - | |
| 1. segmentin gideceği pozisyon değerini ayarlayın. | |||||||
P07-10 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
1.Segment için Maksimum Hız | Run/Rdy | Hemen | 100 | 1 - 5000 | - | rpm | |
| Motorun 1'inci segment pozisyonuna giderken ki maksimum hızını ayarlayın. Maksimum hızı, motorun hızlanma ve yavaşlama sürecinde olmayan hızını ifade eder. P07-09 (1. Pozisyon değeri) çok küçük ayarlanırsa, motorun gerçek hızı P07-10'dan daha az olacaktır. | |||||||
P07-11 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
1.Segment için Hızlanma Yavaşlama Süresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | ms | |
| Multi-segment modunda, 1.segment için motorun hızlanma ve yavaşlama süresi için kullanılır. | |||||||
P07-12 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
1.Segment Pozisyonu Tamamlandıktan Sonra Bekleme Suresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | P07-06 | |
| Multi-segment modunda, 1.segment pozsiyonu bitirdikten sonra diğer segmente geçmeden önce bekleme süresi. Bekleme süresi birimi P07-06 parametresinde ayarlanan birime göredir. | |||||||
P07-13 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 2.Segment Pozisyon | Run/Rdy | Hemen | 10000 | -2147483647 - 2147483646 | - | - |
P07-14 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
2.Segment için Maksimum Hız | Run/Rdy | Hemen | 100 | 1 - 5000 | - | rpm |
P07-15 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
2.Segment için Hızlanma Yavaşlama Süresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | ms |
P07-16 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
2.Segment Pozisyonu Tamamlandıktan Sonra Bekleme Suresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | P07-06 |
P07-17 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 3.Segment Pozisyon | Run/Rdy | Hemen | 10000 | -2147483647 - 2147483646 | - | - |
P07-18 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
3.Segment için Maksimum Hız | Run/Rdy | Hemen | 100 | 1 - 5000 | - | rpm |
P07-19 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
3.Segment için Hızlanma Yavaşlama Süresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | ms |
P07-20 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
3.Segment Pozisyonu Tamamlandıktan Sonra Bekleme Suresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | P07-06 |
P07-21 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 4.Segment Pozisyon | Run/Rdy | Hemen | 10000 | -2147483647 - 2147483646 | - | - |
P07-22 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
4.Segment için Maksimum Hız | Run/Rdy | Hemen | 100 | 1 - 5000 | - | rpm |
P07-23 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
4.Segment için Hızlanma Yavaşlama Süresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | ms |
P07-24 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
4.Segment Pozisyonu Tamamlandıktan Sonra Bekleme Suresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | P07-06 |
P07-25 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 5.Segment Pozisyon | Run/Rdy | Hemen | 10000 | -2147483647 - 2147483646 | - | - |
P07-26 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
5.Segment için Maksimum Hız | Run/Rdy | Hemen | 100 | 1 - 5000 | - | rpm |
P07-27 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
5.Segment için Hızlanma Yavaşlama Süresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | ms |
P07-28 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
5.Segment Pozisyonu Tamamlandıktan Sonra Bekleme Suresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | P07-06 |
P07-29 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 6.Segment Pozisyon | Run/Rdy | Hemen | 10000 | -2147483647 - 2147483646 | - | - |
P07-30 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
6.Segment için Maksimum Hız | Run/Rdy | Hemen | 100 | 1 - 5000 | - | rpm |
P07-31 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
6.Segment için Hızlanma Yavaşlama Süresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | ms |
P07-32 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
6.Segment Pozisyonu Tamamlandıktan Sonra Bekleme Suresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | P07-06 |
P07-33 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 7.Segment Pozisyon | Run/Rdy | Hemen | 10000 | -2147483647 - 2147483646 | - | - |
P07-34 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
7.Segment için Maksimum Hız | Run/Rdy | Hemen | 100 | 1 - 5000 | - | rpm |
P07-35 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
7.Segment için Hızlanma Yavaşlama Süresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | ms |
P07-36 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
7.Segment Pozisyonu Tamamlandıktan Sonra Bekleme Suresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | P07-06 |
P07-37 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 8.Segment Pozisyon | Run/Rdy | Hemen | 10000 | -2147483647 - 2147483646 | - | - |
P07-38 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
8.Segment için Maksimum Hız | Run/Rdy | Hemen | 100 | 1 - 5000 | - | rpm |
P07-39 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
8.Segment için Hızlanma Yavaşlama Süresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | ms |
P07-40 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
8.Segment Pozisyonu Tamamlandıktan Sonra Bekleme Suresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | P07-06 |
P07-41 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 9.Segment Pozisyon | Run/Rdy | Hemen | 10000 | -2147483647 - 2147483646 | - | - |
P07-42 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
9.Segment için Maksimum Hız | Run/Rdy | Hemen | 100 | 1 - 5000 | - | rpm |
P07-43 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
9.Segment için Hızlanma Yavaşlama Süresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | ms |
P07-44 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
9.Segment Pozisyonu Tamamlandıktan Sonra Bekleme Suresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | P07-06 |
P07-45 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 10.Segment Pozisyon | Run/Rdy | Hemen | 10000 | -2147483647 - 2147483646 | - | - |
P07-46 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
10.Segment için Maksimum Hız | Run/Rdy | Hemen | 100 | 1 - 5000 | - | rpm |
P07-47 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
10.Segment için Hızlanma Yavaşlama Süresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | ms |
P07-48 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
10.Segment Pozisyonu Tamamlandıktan Sonra Bekleme Suresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | P07-06 |
P07-49 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 11.Segment Pozisyon | Run/Rdy | Hemen | 10000 | -2147483647 - 2147483646 | - | - |
P07-50 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
11.Segment için Maksimum Hız | Run/Rdy | Hemen | 100 | 1 - 5000 | - | rpm |
P07-51 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
11.Segment için Hızlanma Yavaşlama Süresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | ms |
P07-52 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
11.Segment Pozisyonu Tamamlandıktan Sonra Bekleme Suresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | P07-06 |
P07-53 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 12.Segment Pozisyon | Run/Rdy | Hemen | 10000 | -2147483647 - 2147483646 | - | - |
P07-54 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
12.Segment için Maksimum Hız | Run/Rdy | Hemen | 100 | 1 - 5000 | - | rpm |
P07-55 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
12.Segment için Hızlanma Yavaşlama Süresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | ms |
P07-56 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
12.Segment Pozisyonu Tamamlandıktan Sonra Bekleme Suresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | P07-06 |
P07-57 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 13.Segment Pozisyon | Run/Rdy | Hemen | 10000 | -2147483647 - 2147483646 | - | - |
P07-58 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
13.Segment için Maksimum Hız | Run/Rdy | Hemen | 100 | 1 - 5000 | - | rpm |
P07-59 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
13.Segment için Hızlanma Yavaşlama Süresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | ms |
P07-60 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
13.Segment Pozisyonu Tamamlandıktan Sonra Bekleme Suresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | P07-06 |
P07-61 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 14.Segment Pozisyon | Run/Rdy | Hemen | 10000 | -2147483647 - 2147483646 | - | - |
P07-62 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
14.Segment için Maksimum Hız | Run/Rdy | Hemen | 100 | 1 - 5000 | - | rpm |
P07-63 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
14.Segment için Hızlanma Yavaşlama Süresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | ms |
P07-64 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
14.Segment Pozisyonu Tamamlandıktan Sonra Bekleme Suresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | P07-06 |
P07-65 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 15.Segment Pozisyon | Run/Rdy | Hemen | 10000 | -2147483647 - 2147483646 | - | - |
P07-66 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
15.Segment için Maksimum Hız | Run/Rdy | Hemen | 100 | 1 - 5000 | - | rpm |
P07-67 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
15.Segment için Hızlanma Yavaşlama Süresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | ms |
P07-68 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
15.Segment Pozisyonu Tamamlandıktan Sonra Bekleme Suresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | P07-06 |
P07-69 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| 16.Segment Pozisyon | Run/Rdy | Hemen | 10000 | -2147483647 - 2147483646 | - | - |
P07-70 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
16.Segment için Maksimum Hız | Run/Rdy | Hemen | 100 | 1 - 5000 | - | rpm |
P07-71 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
16.Segment için Hızlanma Yavaşlama Süresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | ms |
P07-72 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
16.Segment Pozisyonu Tamamlandıktan Sonra Bekleme Suresi | Run/Rdy | Hemen | 100 | 1 - 65535 | - | P07-06 |
Grup P10 Gelişmiş Parametreler
P10-01 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
JOG Hızı | Run/Rdy | Hemen | 100 | 0 - 3000 | Gelişmiş Parametreler | ms | |
Jog hızını ayarlamak için kullanılır. | |||||||
P10-02 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Fabrika Ayarlarına Resetleme | Rdy | Servo Restart Edilmeli | 0 | 0 - 1 | Gelişmiş Parametreler | - | |||||||||
Servo sürücünün parametrelerini fabrika ayarlarına sıfırlamak için kullanılır.
| |||||||||||||||
P10-03 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Hata Resetleme | Run/Rdy | Hemen | 0 | 0 - 1 | Gelişmiş Parametreler | - | ||||||||||
Hata resetleme;
✎Not: Servo S-ON (RUN) komutu varsa , arıza giderildiğinde ve hata resetlendiğinde, servo doğrudan “RUN” durumuna girecektir. Arıza giderme işlemlerini gerçekleştirirken,iş güvenliğini sağlamak için servo komut talimatlarını durdurmayı unutmayın. | ||||||||||||||||
P10-04 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Motor Aşırı Yük Koruma Zaman Faktörü | Run/Rdy | Hemen | 100 | 1 - 800 | Gelişmiş Parametreler | % | |
Bu parametre ile A-82 (Motor aşırı yük uyarısı) ve Er.34 (Motor aşırı yük koruma hatası) kodları için zaman faktörünü ayarlayabilirsiniz. Motorun ısınma durumuna göre, bu değerin değiştirilmesi aşırı yük koruma süresinin referans değerde yukarı ve aşağı dalgalanmasına neden olabilir. 50 %50'ye karşılık gelir, yani süre yarı yarıya azalır; 300 %300'e karşılık gelir, yani süre 3 katına çıkar. | |||||||
P10-05 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Motor Modeli | Rdy | Servo Restart Edilmeli | 0 | 0 - 65535 | Gelişmiş Parametreler | - | |
Bu parametre, servo sürücü tarafından o anda tanınan motorun motor kodunu gösterir. ✎Note: Servo sürücüye güç vermeden önce motor güç ve enkoder kablolarının bağlanması gerekmektedir. Aksi takdirde sürücü “Er.27” (enkoder bağlantı hatası) verecektir . ✎Note: VD2L motor modeli parametresi VD2 serisi modellerden farklıdır: VD2L motor model parametresi P10-5 ve P10-7 motor kodu ile kullanmak için manuel olarak ayarlanır. P10-7=1 olarak ayarlandığında, motor kodu P10-5 ayar değerini kullanır. Geçerli motor model kodunu almak için lütfen U0-53 değerini kontrol edin. | |||||||
P10-06 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Çok-Turlu Absolute Enkoder Reset | Rdy | Hemen | 0 | 0 - 1 | Gelişmiş Parametreler | - | |||||||
Çok turlu absolute enkoderin dönüş sayısını (U0-55), mevcut konumu (U0-56) silmek veya enkoder hata alarmlarını silmek için kullanılır
| |||||||||||||
P10-07 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Motor Modelini Manuel Ayarlama | Rdy | Servo Restart Edilmeli | 0 | 0 - 1 | Gelişmiş Parametreler | - | |
Bu parametre ile servo sürücünün motor modeli değiştirilir. 0 olarak ayarlandığında, motor modeli, motor tarafından okunur; 1 olarak ayarlandığında, motor modeli P10-05 parametresi ile ayarlanır. ✎Note: VD2L, diğer VD2 serisi modellerden farklı olarak motor modelini manuel olarak ayarlar: Servo sürücünün Motor Modelini değiştirmek için kullanılır. 0: Motor modelini otomatik olarak okur. 1:P10-05 parametresinde ayarlanan motor modelini okur. ✎Note: Lütfen motor modelini isteğe bağlı olarak değiştirmeyin, aksi takdirde motor hasar görebilir. | |||||||
P10-08 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
| Çok Turlu Absolute Enkoder Orijin Ofset Değeri | Run/Rdy | Hemen | 0 | 2147483647 - 2147483646 | Gelişmiş Parametreler | - | |
P10-08 çok turlu mutlak enkoder orijin ofset kompanzasyonu, U0-56 çok turlu absolute enkoderin anlık konumu ile birlikte kullanılır. P10-6 (enkoder resetleme) 1'e ayarlandığında, U0-56 (enkoder anlık pozisyon) değeri P10-8'e güncellenir. | |||||||
P10-11 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Motor Durması ve Aşırı Sıcaklık Koruması İşlevini Etkinleştirme | Rdy | Servo Restart Edilmeli | 0 | 0 - 1 | Gelişmiş Parametreler | - | |||||||
This function code displays the motor code of the motor currently recognized by the servo drive (including the last successful recognition).
| |||||||||||||
Grup P12 Haberleştirme Parametreleri
P12-01 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Servo Modbus Adresi | Run/Rdy | Hemen | 1 | 1 - 247 | Haberleştirme | - | |
Servo sürücünün modbus adres parametresi. | |||||||
P12-02 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Baud rate | Run/Rdy | Hemen | 2 | 0 - 6 | Haberleştirme | - | |||||||||||||||||||
Servo sürücünün modbus için baudrare değeri. Servo sürücünün baudrate değeri ile ModBus yazılımıyla tutarlı olmalıdır, aksi takdirde haberleşemez.
| |||||||||||||||||||||||||
P12-03 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Seri Data Formatı | Run/Rdy | Hemen | 0 | 0 - 3 | Haberleştirme | - | |||||||||||
Servo sürücü ModBus ile haberleştirme kurarken veri doğrulama modunu ayarlamak için kullanılır. Servo sürücünün veri formatı ModBus yazılımınınki ile tutarlı olmalıdır, aksi takdirde iletişim kuramaz.
| |||||||||||||||||
P12-04 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Modbus Haberleştirme Değerlerini EEPROM'a Yazma | Run/Rdy | Hemen | 0 | 0 - 1 | Haberleştirme | - | |||||||
Haberleşme ile yazılan servo parametre değerlerinin EEPROM'a kaydedilip kaydedilmeyeceği parametresi.
✎Not: Parametre değerlerini sık sık değiştirmeniz gerekiyorsa, fonksiyon kodunu 0 olarak ayarlamanız önerilir, aksi takdirde EEPROM'un sık sık silinmesi nedeniyle EEPROM zarar görür. Servo sürücüde “Er.02” (Parametre Depolama Hatası) oluşacaktır. | |||||||||||||
P12-05☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
RS422/RS485 Seçimi | Run/Rdy | Hemen | 0 | 0 - 1 | Haberleştirme | - | |||||||
VD2F servo sürücünün haberleştirme yöntemini ayarlamak için kullanılır.
✎Note: “☆” sadece VD2F servo sürücünün bu fonksiyonu desteklediğini gösterir. VD2-0XXSA1G modelleri bu fonksiyonu desteklemez. | |||||||||||||
P12-06☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Modbus 32-bit Değişken High and Low Byte Düzeni | Run/Rdy | Hemen | 0 | 0 - 1 | Haberleştirme | - | |||||||
Servo sürücü ModBus ile haberleşirken veri haberleşme formatını ayarlamak için kullanılır.
Servo sürücünün veri formatı ModBus yazılımınınki ile tutarlı olmalıdır; aksi takdirde iletişim başarısız olur. | |||||||||||||
Grup P13 Sanal Giriş Çıkış Terminalleri
Servonun CN2 portunda bulunan dijital input (DI) ve dijital output(DO) terminalleri, sanal olarak ON/OFF komutları verilebilir.
P13-01 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Sanal DI1 Terminali | Run/Rdy | Hemen | 0 | 0 - 1 | Dijital Terminaller | - | |||||||
P06-04 parametresi "1" olarak ayarlandığında, DI1 terminali sanal kullanım moduna geçecektir. P06-04 parametresi "1" olarak ayarlandıktan sonra, P13-01 parametresi "0" olarak ayarlıysa terminal ON konumunda, "1" olarak ayarlıysa terminal OFF konumunda olacaktır.
| |||||||||||||
P13-02 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Sanal DI2 Terminali | Run/Rdy | Hemen | 0 | 0 - 1 | Dijital Terminaller | - | |
P06-07 parametresi "1" olarak ayarlandığında, DI2 terminali sanal kullanım moduna geçecektir. | |||||||
P13-03 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Sanal DI3 Terminali | Run/Rdy | Hemen | 0 | 0 - 1 | Dijital Terminaller | - | |
| P06-10 parametresi "1" olarak ayarlandığında, DI3 terminali sanal kullanım moduna geçecektir. | |||||||
P13-04 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Sanal DI4 Terminali | Run/Rdy | Hemen | 0 | 0 - 1 | Dijital Terminaller | - | |
| P06-13 parametresi "1" olarak ayarlandığında, DI4 terminali sanal kullanım moduna geçecektir. | |||||||
P13-05 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Sanal DI5 Terminali | Run/Rdy | Hemen | 0 | 0 - 1 | Dijital Terminaller | - | |
| P06-16 parametresi "1" olarak ayarlandığında, DI5 terminali sanal kullanım moduna geçecektir. | |||||||
P13-06☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Sanal DI6 Terminali | Run/Rdy | Hemen | 0 | 0 - 1 | Dijital Terminaller | - | |
P06-19 parametresi "1" olarak ayarlandığında, DI6 terminali sanal kullanım moduna geçecektir. “☆” VD2F serisi bu fonksiyonu desteklemez. | |||||||
P13-07☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Sanal DI7 Terminali | Run/Rdy | Hemen | 0 | 0 - 1 | Dijital Terminaller | - | |
P06-22 parametresi "1" olarak ayarlandığında, DI7 terminali sanal kullanım moduna geçecektir. “☆” VD2F serisi bu fonksiyonu desteklemez. | |||||||
P13-08☆ | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Sanal DI8 Terminali | Run/Rdy | Hemen | 0 | 0 - 1 | Dijital Terminaller | - | |
P06-25 parametresi "1" olarak ayarlandığında, DI8 terminali sanal kullanım moduna geçecektir. “☆” VD2F serisi bu fonksiyonu desteklemez. | |||||||
P13-11 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Sanal DO1 Terminali | Run/Rdy | Hemen | 0 | 0 - 1 | Dijital Terminaller | - | |||||||
DO1 (dijital çıkış1) terminalini, sanal olarak ON/OFF çıkışı vermek için kullanılır.
| |||||||||||||
P13-12 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Sanal DO2 Terminali | Run/Rdy | Hemen | 0 | 0 - 1 | Dijital Terminaller | - |
P13-13 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Sanal DO3 Terminali | Run/Rdy | Hemen | 0 | 0 - 1 | Dijital Terminaller | - |
P13-14 | Parametre | Düzenleme Modu | Etkin zaman | Default | Değer Aralığı | Kategori | Birim |
|---|---|---|---|---|---|---|---|
Sanal DO4 Terminali | Run/Rdy | Hemen | 0 | 0 - 1 | Dijital Terminaller | - |
Grup U0 Görüntüleme Parametreleri
U0-01 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Servo Durumu | 1 - 4 | Decimal | 16-Bit | - | Görüntüleme | |||||||||||||
Servo sürücünün durumunu görüntüleme parametresidir.
| ||||||||||||||||||
U0-02 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori | ||||
|---|---|---|---|---|---|---|---|---|---|---|
Servo Motor Hızı | -5000 - 5000 | Decimal | 16-Bit | rpm | Görüntüleme | |||||
Servo motorun anlık hızını görüntüleme parametresidir. RPM olarak gösterilir.
| ||||||||||

U0-03 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori | ||||
|---|---|---|---|---|---|---|---|---|---|---|
Dahili Komut Hız Değeri | -5000 - 5000 | Decimal | 16-Bit | rpm | Görüntüleme | |||||
Servo motor dahili hız komutlarıyla kullanılıyorsa, verilen hız komutunun görüntüleme adresidir.
| ||||||||||
U0-04 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori | ||||
|---|---|---|---|---|---|---|---|---|---|---|
Pozisyon Talimatına Karşılık Gelen Hızı | -5000 - 5000 | Decimal | 16-Bit | rpm | Görüntüleme | |||||
Pozisyon modunda, servo sürücünün mevcut hız komut değerini görüntüler. Servo sürücü panelinin ekranı aşağıdaki gibidir.
| ||||||||||
U0-05 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Pulse Sapması | -231 - 231 | Decimal | 32-Bit | Pulse | Görüntüleme | |
Pulse sapmasını görüntüleme adresidir. U0-05 değeri 32768 olaraksa, servo sürücü panelinin ekranı aşağıdaki gibidir.
| ||||||
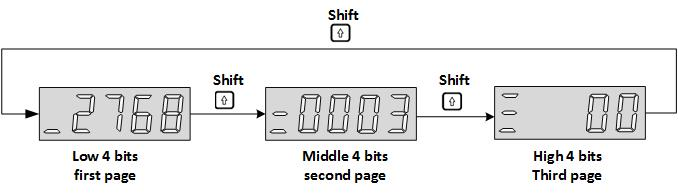
U0-08 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Pulse Giriş Frekansı | - | Decimal | 16-Bit | kHz | Görüntüleme | |
| Servo sürücünün pulse giriş frekansını görüntüler. | ||||||
U0-09 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Pulse Giriş Sayısı | -231 - 231 | Decimal | 32-Bit | Pulse | Görüntüleme | |
Pulse giriş sayısını görüntüleme adresidir. U0-09 değeri -2147483646 olaraksa, servo sürücü panelinin ekranı aşağıdaki gibidir.
| ||||||
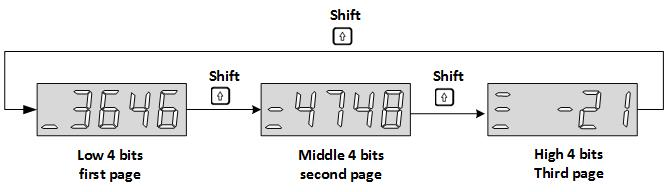
U0-12 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Tork Değeri | -3000 - 3000 | Decimal | 16-Bit | 0.1% | Görüntüleme |
U0-13 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Enkoder Kümülatif Pozisyonu (Lower 32 bits) | -231 - 231 | Decimal | 32-Bit | Encoder Birimi | Görüntüleme |
U0-15 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Enkoder Kümülatif Pozisyonu (High 32 bits) | -231 - 231 | Decimal | 32-Bit | Encoder Birimi | Görüntüleme | |
| Enkoder pozisyonunun kümülatif değerini görüntüler. U0-13 ile birlikte kullanılır. | ||||||
U0-16 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Duruş Vibrasyon Frekansı | 0 - 2000 | Decimal | 16-Bit | 0.1Hz | Görüntüleme | |
| Durmak için yavaşlama sırasında algılanan frekansı görüntüleme adresidir. | ||||||
U0-17 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Dijital Giriş(DI) Sinyal Durumu | 00000000 - 11111111 | Binary | 16-Bit | - | Görüntüleme | |
DI terminallerinin mevcut sinyal durumunu görüntüleme adresidir. LED panelindeki dijital çizgilerde üst kısmı "ON" durumunu göstermek için yanar (“1” ile gösterilir). Alt kısım "OFF" durumunu göstermek için yanar (“0” ile gösterilir). Örnek olarak DI1-DI7 arasındaki terminallerin giriş sinyallerini ON olarak ve DI8 sinyalini OFF olarak tanımlarsak ekranda görüntülenecek olan şekil aşağıdaki gibidir. Binary olarak gösterimi “01111111 ” şeklindedir.
| ||||||
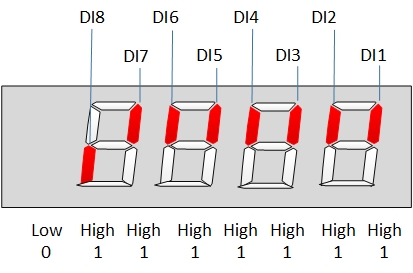
U0-19 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Dijital Giriş(DI) Sinyal Durumu | 00000000 - 00001111 | Binary | 16-Bit | - | Görüntüleme | |
DO terminallerinin mevcut sinyal durumunu görüntüleme adresidir. LED panelindeki dijital çizgilerde üst kısmı "ON" durumunu göstermek için yanar (“1” ile gösterilir). Alt kısım "OFF" durumunu göstermek için yanar (“0” ile gösterilir). Örnek olarak DO1, DO2 ve DO3 terminallerini çıkışları ON ve DO2'nin çıkışını OFF olarak tanımlarsak ekranda görüntülenecek olan şekil aşağıdaki gibidir. Binary olarak gösterimi “1101" şeklindedir.
| ||||||
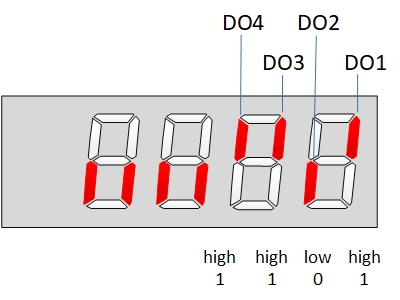
U0-20 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Yük Atalet Oranı | 0 - 1000000 | Decimal | 16-Bit | % | Görüntüleme | |
Yük atalet oranını görüntüleme adresidir. Yük atalet oranı 3 kat (%300) ise, servo sürücü paneli aşağıdaki gibi görüntülenir.
| ||||||
U0-21☆ | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori | ||||
|---|---|---|---|---|---|---|---|---|---|---|
Analog Giriş 1(A1) Gerilimi | - | Decimal | 16-Bit | V | Görüntüleme | |||||
Analog Giriş 1 (AI1) giriş gerilimini gösterir.
“☆” VD2F serisi desteklemez. | ||||||||||


U0-22☆ | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
Analog Giriş 2(A2) Gerilimi | - | Decimal | 16-Bit | V | Görüntüleme | |
| “☆” VD2F serisi desteklemez. | ||||||
U0-23 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
Vibrasyon Frekansı | - | Decimal | 16-Bit | Hz | Görüntüleme |
U0-24 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
Vibrasyon Genliği | - | Decimal | 16-Bit | rpm | Görüntüleme |
U0-25 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
Ileri Yön Tork Limit Değeri | 0 - 300 | Decimal | 16-Bit | % | Görüntüleme | |
P01-15 (Ileri Yönde Tork Limiti) parametresinde belirlenen değeri gösterir. Eğer 2880 olarak ayarlandıysa aşağıdaki gibi gözükecektir (288%).
| ||||||
U0-26 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
Geri Yön Tork Limit Değeri | 0 - 300 | Decimal | 16-Bit | % | Görüntüleme | |
P01-16 (Geri Yönde Tork Limiti) parametresinde belirlenen değeri gösterir. Eğer 3000 olarak ayarlandıysa aşağıdaki gibi gözükecektir (300%).
| ||||||
U0-27 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
Ileri Yön Hız Sınırı | 0 - 5000 | Decimal | 16-Bit | rpm | Görüntüleme | |
P01-12 (Ileri Yönde Hız Sınırı) parametresinde belirlenen değeri gösterir. Eğer 2000 olarak ayarlandıysa aşağıdaki gibi gözükecektir (2000).
| ||||||
U0-27 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
Geri Yön Hız Sınırı | -5000 - 0 | Decimal | 16-Bit | rpm | Görüntüleme | |
P01-13 (Geri Yönde Hız Sınırı) parametresinde belirlenen değeri gösterir. Eğer 3000 olarak ayarlandıysa aşağıdaki gibi gözükecektir (-3000)
| ||||||
U0-29 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
Mekaniksel Açı | 0 - 359 | Decimal | 16-Bit | ° | Görüntüleme | |
Motorun mevcut mekanik açısını gösterir. 0, 0 derecelik bir mekanik açıya karşılık gelir. Mekanik açı 270° ise, servo sürücü paneli aşağıdaki gibi görüntülenir.
| ||||||
U0-30 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
Elektriksel Açı | 0 - 359 | Decimal | 16-Bit | ° | Görüntüleme | |
Motorun mevcut elektrik açısını gösterir. Motor döndüğünde, açı aralığı 360°'dir. Motor 4 kutuplu olduğunda, motor her bir tur döndürüldüğünde, dört kez 0° ila 359°'lik bir değişim sürecinden geçer.
| ||||||
U0-31 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
Bara Gerilimi | - | Decimal | 16-Bit | V | Görüntüleme | |
Servo sürücünün DC bara gerilimini görüntüleme adresidir. Bara gerilimi 310.9 ise, servo sürücü paneli aşağıdaki gibi görüntülenir.
| ||||||
U0-32 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
Radyatör Sıcaklığı | - | Decimal | 16-Bit | °C | Görüntüleme |
U0-33 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Anlık Çıkış Gücü | - | Decimal | 16-Bit | W | Görüntüleme |
U0-34 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Ortalama Çıkış Gücü | - | Decimal | 16-Bit | W | Görüntüleme |
U0-35 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Toplam Çalışma Süresi (Saat) | - | Decimal | 16-Bit | h | Görüntüleme |
U0-37 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Toplam Çalışma Süresi (Dakika) | - | Decimal | 16-Bit | m | Görüntüleme |
U0-38 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Toplam Çalışma Süresi (Saniye) | - | Decimal | 16-Bit | s | Görüntüleme |
U0-39 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Yük Torku Yüzdesi | - | Decimal | 16-Bit | % | Görüntüleme | |
Mevcut yük tork yüzdesini görüntüleyin. Mevcut yük tork yüzdesi %10,3 ise, servo sürücü paneli aşağıdaki gibi görüntülenir.
| ||||||
U0-40 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Çalışma Süresi (Saat) | - | Decimal | 16-Bit | h | Görüntüleme |
U0-42 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Çalışma Süresi (Dakika) | - | Decimal | 16-Bit | m | Görüntüleme |
U0-43 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Çalışma Süresi (Saniye) | - | Decimal | 16-Bit | s | Görüntüleme |
U0-44 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Anlık Frenleme Direnci Gücü | - | Decimal | 16-Bit | W | Görüntüleme |
U0-46 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Ortalama Frenleme Direnci Gücü | - | Decimal | 16-Bit | W | Görüntüleme |
U0-48 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Güç Açma Sayısı | - | Decimal | 16-Bit | Kez | Görüntüleme |
U0-49 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Motor Aşırı Yükünün Sayımı | - | Decimal | 16-Bit | 100 | Görüntüleme |
U0-50 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Motor Kümülatif Dönüş sayısı (Low 32 bit) | 0 - 232-1 | Decimal | 32-Bit | Döngü | Görüntüleme |
U0-51 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Motor Kümülatif Dönüş sayısı (High 32 bit) | 0 - 232-1 | Decimal | 32-Bit | Döngü | Görüntüleme |
U0-53 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Motor Model Kodu | - | Hexadecimal | 16-Bit | - | Görüntüleme | |
Mevcut motor model kodunu görüntüleme parametresi. WD80M-07530S-A1F (A026) örnek olarak alındığında, servo sürücü paneli aşağıdaki gibi görüntülenir.
| ||||||

U0-54 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Absolute Enkoderin 1 Tur Içindeki Pozisyonu | 0 - 232-1 | Decimal | 32-Bit | Encoder Birimi | Görüntüleme | |
Absolute enkoderin bir turluk dönüşündeki pozisyonunun değerini görüntüleme adresidir. | ||||||
U0-55 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Çok Turlu Absolute Encoderin Dönüş Sayısı | 0 - 65535 | Decimal | 32-Bit | Encoder Birimi | Görüntüleme | |
Çok turlu absolute enkoder olan motorun tamamladığı tur sayısını gösterir. | ||||||
U0-56 | Parametre | Aralık | Panel display | Data Tipi | Birim | Kategori |
|---|---|---|---|---|---|---|
| Çok Turlu Absolute Encoderin Anlık Pozisyonu | -231 - 231 | Decimal | 32-Bit | Encoder Birimi | Görüntüleme | |
| Motorun absolute pozisyon değerini görüntüler (Belirlenen pulse/tur oranına göre). Sadece çok turlu absolute enkoder olan motorlar için geçerlidir | ||||||
Group U1 Warning monitoring
U1-01 | Monitoring name | Range | Category | Panel display | Unit | Data type | ||||
Current fault code | - | Warning | - | - | 16-bit | |||||
If there is fault in servo drive, it would display the corresponding fault. If not, the panel displays “---”. Take the fault “encoder disconnect” as an example, the panel of servo drive is displayed as below.
| ||||||||||

U1-02 | Monitoring name | Range | Category | Panel display | Unit | Data type | ||||
Current warning code | - | Warning | - | - | 16-bit | |||||
If there is warning in servo drive, it would display the corresponding warning. If not, the panel displays “---”. Take the warning“DI port configuration duplication” as an example, the panel is displayed as below.
| ||||||||||
U1-03 | Monitoring name | Range | Category | Panel display | Unit | Data type |
U phase current when faults occur | - | Warning | Decimal | A | 16-bit |
U1-04 | Monitoring name | Range | Category | Panel display | Unit | Data type |
V phase current when faults occur | - | Warning | Decimal | A | 16-bit |
U1-05 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Bus voltage when faults occur | - | Warning | Decimal | V | 16-bit |
U1-06 | Monitoring name | Range | Category | Panel display | Unit | Data type |
IGBT temperature when faults occur | - | Warning | Decimal | ℃ | 16-bit |
U1-07 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Torque component when faults occur | - | Warning | Decimal | % | 16-bit |
U1-08 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Excitation component when faults occur | - | Warning | Decimal | % | 16-bit |
U1-09 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Position deviation when faults occur | - | Warning | Decimal | Encoder unit | 32-bit |
U1-10 | Monitoring name | Range | Category | Panel display | Unit | Data type |
The speed when faults occur | - | Warning | Decimal | rpm | 16-bit |
U1-11 | Monitoring name | Range | Category | Panel display | Unit | Data type |
The time when faults occur | - | Warning | Decimal | s | 16-bit |
U1-12 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Number of faults in this operation | - | Warning | Decimal | - | 16-bit |
U1-13 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Number of warnings in this operation | - | Warning | Decimal | - | 16-bit |
U1-14 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Total number of historical faults | - | Warning | Decimal | - | 16-bit |
U1-15 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Total number of historical warnings | - | Warning | Decimal | - | 16-bit |
U1-16 | Monitoring name | Range | Category | Panel display | Unit | Data type |
The 1st fault code of the most recent | - | Warning | - | - | 16-bit | |
Display the 1st fault code of the most recent of servo drive | ||||||
U1-17 | Monitoring name | Range | Category | Panel display | Unit | Data type |
The 2nd fault code of the most recent | - | Warning | - | - | 16-bit |
U1-18 | Monitoring name | Range | Category | Panel display | Unit | Data type |
The 3rd fault code of the most recent | - | Warning | - | - | 16-bit |
U1-19 | Monitoring name | Range | Category | Panel display | Unit | Data type |
The 4th fault code of the most recent | - | Warning | - | - | 16-bit |
U1-20 | Monitoring name | Range | Category | Panel display | Unit | Data type |
The 5th fault code of the most recent | - | Warning | - | - | 16-bit |
U1-21 | Monitoring name | Range | Category | Panel display | Unit | Data type |
The 1st warning code of the most recent | - | Warning | - | - | 16-bit | |
Display the 1st warning code of the most recent of servo drive | ||||||
U1-22 | Monitoring name | Range | Category | Panel display | Unit | Data type |
The 2nd warning code of the most recent | - | Warning | - | - | 16-bit |
U1-23 | Monitoring name | Range | Category | Panel display | Unit | Data type |
The 3rd warning code of the most recent | - | Warning | - | - | 16-bit |
U1-24 | Monitoring name | Range | Category | Panel display | Unit | Data type |
The 4th warning code of the most recent | - | Warning | - | - | 16-bit |
U1-25 | Monitoring name | Range | Category | Panel display | Unit | Data type |
The 5th warning code of the most recent | - | Warning | - | - | 16-bit |
Group U2 Device monitoring
U2-01 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Product series | - | Device | Hexadecimal | - | 16-bit | |
Display the product series code of servo drive. The product series code of VD2A and VD2B is 0x4432. The product series code of VD2F is 0x3246. There are displayed as below.
| ||||||

U2-02 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Model | - | Device | Hexadecimal | - | 16-bit | |
Display the servo drive model.
| ||||||

U2-03 | Monitoring name | Range | Category | Panel display | Unit | Data type | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Model | - | Warning | Hexadecimal | - | 16-bit | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||












U2-04 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Firmware version | - | Device | Decimal | - | 16-bit | |
Display the firmware version Display format: X.YY. For example, 1.13. The panel is displayed as below.
| ||||||

U2-05 | Monitoring name | Range | Category | Panel display | Unit | Data type |
FPGA version | - | Device | Decimal | - | 16-bit | |
Display the hardware version (FPGA) Display format: X.YY. For example, 1.01. The panel is displayed as below.
| ||||||

U2-06 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Manufacture date (year) | - | Device | Decimal | Year | 16-bit | |
Firmware date (year) * | ||||||
Display the year of manufacture of the VD2F drive firmware. | ||||||
U2-07 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Manufacture date (month) | - | Device | Decimal | Month | 16-bit | |
Firmware date (month) * | ||||||
Display the month of manufacture of the VD2F drive firmware. | ||||||
U2-08 | Monitoring name | Range | Category | Panel display | Unit | Data type | ||||||
Manufacture date (day) | - | Device | Decimal | Day | 16-bit | |||||||
Firmware date (day) * | ||||||||||||
Displays the production date of the VD2F drive firmware. For example, the firmware production day of VD2F-014SA1P_V1.01 is January 10, 2022, the panel is displayed as below.
| ||||||||||||

U2-09 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Device serial number 1 | - | Warning | Decimal | - | 16-bit |
U2-10 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Device serial number 2 | - | Warning | Decimal | - | 16-bit |
U2-11 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Device serial number 3 | - | Warning | Decimal | - | 16-bit |
U2-12 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Device serial number 4 | - | Warning | Decimal | - | 16-bit |
U2-13 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Device serial number 5 | - | Warning | Decimal | - | 16-bit |
U2-14 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Device serial number 6 | - | Warning | Decimal | - | 16-bit |
U2-15 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Device serial number 7 | - | Warning | Decimal | - | 16-bit |
U2-16 | Monitoring name | Range | Category | Panel display | Unit | Data type |
Device serial number 8 | - | Warning | Decimal | - | 16-bit |